Электрическая машина

Электродвигатели разной мощности (750 Вт, 250 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения
Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую.
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.
Существует множество видов электродвигателей, различающихся по принципу действия, конструкции, исполнению и другим признакам. Рассмотрим основные типы этих электрических машин.
По принципу действия различают магнитоэлектрические и гистерезисные электрические машины. Несмотря на простоту конструкции, высокий пусковой момент, последние не получили широкого распространения. Эти электродвигатели имеют высокую цену, низкий коэффициент мощности, ограничивающие их применение. Подавляющее большинство выпускаемых электродвигателей – магнитоэлектрические.
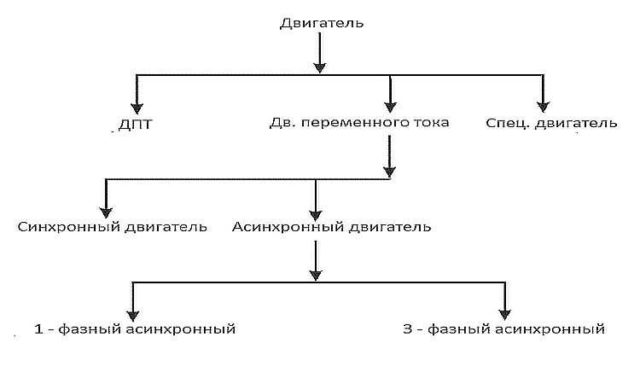
По типу напряжения питания различают:
- Электродвигатели постоянного тока.
- Двигатели переменного тока.
- Универсальные электрические машины.
По конструкции различают электродвигатели с горизонтально и вертикально расположенным валом. Кроме того, электрические машины классифицируют по назначению, климатическому исполнению, степени защиты от попадания влаги и посторонних предметов, мощности и другим параметрам.
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.
Существует множество видов электродвигателей, различающихся по принципу действия, конструкции, исполнению и другим признакам. Рассмотрим основные типы этих электрических машин.
По принципу действия различают магнитоэлектрические и гистерезисные электрические машины. Несмотря на простоту конструкции, высокий пусковой момент, последние не получили широкого распространения. Эти электродвигатели имеют высокую цену, низкий коэффициент мощности, ограничивающие их применение. Подавляющее большинство выпускаемых электродвигателей – магнитоэлектрические.
По типу напряжения питания различают:
- Электродвигатели постоянного тока.
- Двигатели переменного тока.
- Универсальные электрические машины.
По конструкции различают электродвигатели с горизонтально и вертикально расположенным валом. Кроме того, электрические машины классифицируют по назначению, климатическому исполнению, степени защиты от попадания влаги и посторонних предметов, мощности и другим параметрам.
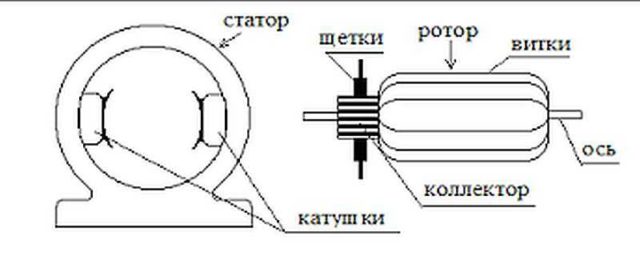
Принцип действия
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока), подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
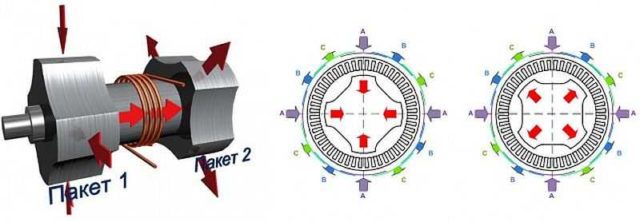
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
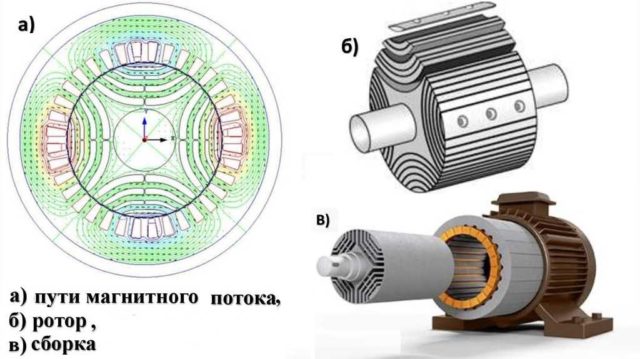
Картина магнитного поля при работе асинхронного двигателя. Видно скольжение ротора относительно поля.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f{displaystyle f}
: nc=60fp{displaystyle n_{c}={frac {60f}{p}}}

При частоте 50 Гц получаем для p{displaystyle p}
= 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля nc{displaystyle n_{c}}
= 3000, 1500 и 1000 об/мин.


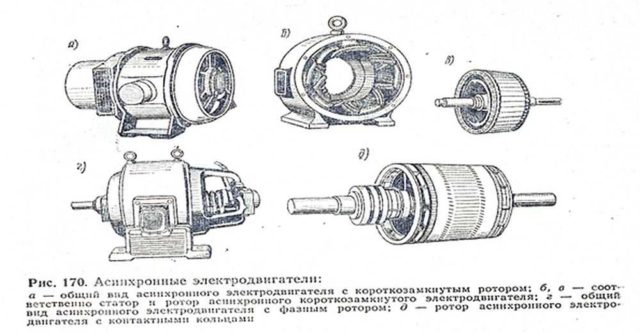
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и закорачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трёхфазная обмотка, похожая на обмотку статора, включённую, например, звездой; начала фаз соединяются с тремя контактными кольцами, закреплёнными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щётки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Асинхронные электродвигатели широко применяются в тяжелой промышленности в качестве вспомогательных машин для компрессоров или выпрямительных установок.
Асинхронные электродвигатели имеют ряд преимуществ перед коллекторными, такие как: меньший износ якоря за счет отсутствия коллектора, вариативность управления, более высокий КПД и простота конструкции[источник не указан 328 дней].
Классификация электродвигателей
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создаётся вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
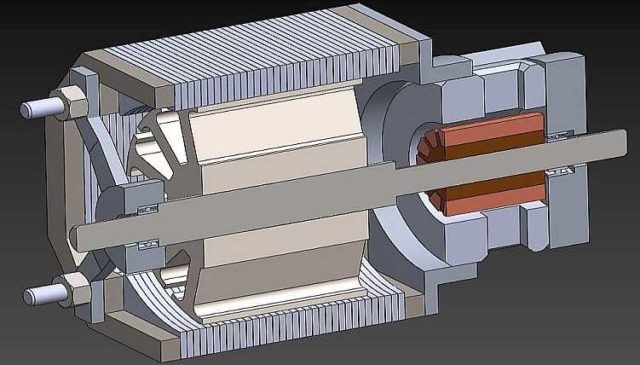
Двигатели постоянного тока

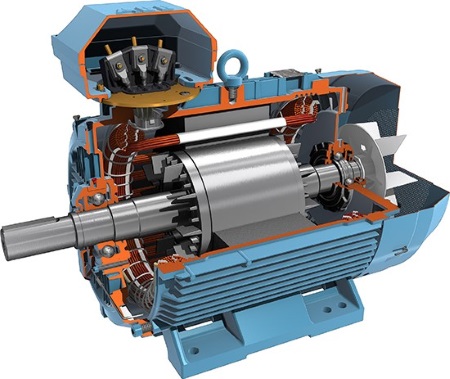
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатель постоянного тока — двигатель, переключение фаз в котором осуществляется прямо в самом двигателе. Благодаря этому такой двигатель может питаться постоянным током, но также и переменным.
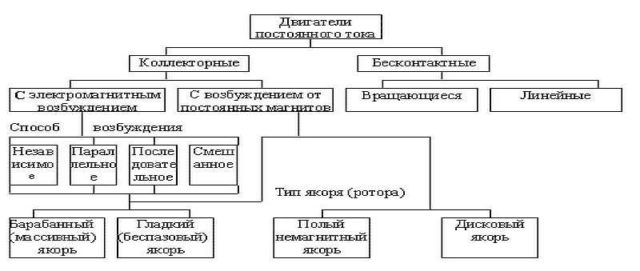
Данная группа двигателей в свою очередь разделяется по способу переключения фаз и наличию обратной связи подразделяется на:
- Коллекторные двигатели;
- Вентильные двигатели (бесколлекторный электродвигатель).
Щёточно-коллекторный узел обеспечивает электрическое синхронное переключение цепей вращающейся части машины и является наиболее ненадёжным и сложным в обслуживании конструктивным элементом.
По типу возбуждения коллекторные двигатели можно разделить на:
- Двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- Двигатели с самовозбуждением.
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением (обмотка якоря включается параллельно обмотке возбуждения);
- Двигатели последовательного возбуждения (обмотка якоря включается последовательно обмотке возбуждения);
- Двигатели смешанного возбуждения (часть обмотки возбуждения включается последовательно с якорем, а вторая часть — параллельно обмотке якоря или последовательно соединённым обмотке якоря и первой обмотки возбуждения, в зависимости от требуемой нагрузочной характеристики).
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели в котором переключение фаз осуществляется с помощью специального электронного блока (инвертора), могут быть с обратной связью с использованием датчика положения ротора, либо без обратной связи, фактически аналог асинхронного.
Двигатели постоянного тока широко применяются в качестве привода электротранспорта, промышленного оборудования, а также микропривода исполнительных механизмов. Такие электрические машины обладают следующими преимуществами:
- Возможность регулировки частоты вращения путем изменения напряжения в обмотке возбуждения. При этом крутящий момент на валу ДПТ (двигатели постоянного тока) остается неизменным.
- Высокий к.п.д. (коэффициент полезного действия) у машин постоянного тока несколько выше, чем у самых распространенных асинхронных двигателей переменного тока. При неполной нагрузке на валу к.п.д. ДПТ выше на 10-15%.
- Возможность изготовления ДПТ небольших габаритов. Практически все используемые микроприводы рассчитаны на постоянный ток.
- Простота схем управления. Для пуска, реверса и регулирования скорости и момента не требуется сложного электронного оборудования и большого количества аппаратов для коммутации.
- Возможность работы в режиме генератора. Электродвигатели такого типа можно использовать в качестве источников постоянного тока.
- Высокий пусковой момент. ДПТ используют в составе электроприводов кранов, тяговых и грузоподъемных механизмов, где требуется запуск под значительной нагрузкой.
ДПТ различают по способу возбуждения, они бывают:
- С постоянными магнитами. Такие двигатели отличаются малыми габаритами. Основная область их применения – микроприводы.
- С электромагнитным возбуждением.
Электрические машины с электромагнитами такого типа получили самое широкое распространение. Их классифицируют по способу подключения обмотки статора:
- Двигатели с параллельным возбуждением. Обмотки якоря и статора в электрической машине такого типа соединены параллельно. Такие электрические машины не требуют дополнительного источника питания для обмотки возбуждения, скорость вращения ротора практически не зависит от нагрузки. Их используют для привода металлорежущих станков и другого оборудования.
- Электродвигатели с последовательно включенной обмоткой статора. ДПТ этого типа имеют значительный пусковой момент. Их применяют в качестве привода электротранспорта и промышленных установок с необходимостью пуска под нагрузкой.
- Двигатели с независимым возбуждением. Для питания обмотки статора таких электромашин используется независимый источник постоянного тока. ДПТ такого типа отличаются широким диапазоном регулирования скоростей.
- Электрические машины со смешанным возбуждением. Электромагнит возбуждения в таких двигателях поделен на 2 части. Одна из них включена параллельно, вторая последовательно обмотке якоря. Электрические машины такого типа используются в механизмах и оборудовании, где необходим высокий пусковой момент, а также переменная и постоянная скорость при переменном моменте.
Двигатели пульсирующего тока
Двигатель пульсирующего тока — электрический двигатель, питание которого осуществляется пульсирующим электрическим током. По конструкции очень близок к двигателю постоянного тока. Его конструктивными отличиями от двигателя постоянного тока являются шихтованные вставки в остове, шихтованные дополнительные полюса, большее число пар полюсов, наличие компенсационной обмотки. Применяется на электровозах с установками для выпрямления переменного тока
Двигатели переменного тока
Трёхфазные асинхронные двигатели
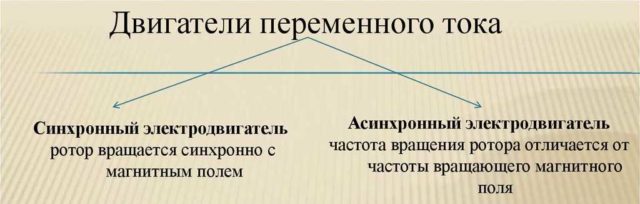
Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения.
Синхронные электродвигатели подразделяются на :
- синхронный двигатель с обмотками возбуждения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).
- синхронный двигатель с постоянными магнитами;
- синхронный реактивный двигатель;
- гистерезисный двигатель;
- шаговый двигатель;
- гибридный синхронный реактивный двигатель с постоянными магнитами;
- реактивно-гистерезисный двигатель.
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели . У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
- однофазные — запускаются вручную, имеют пусковую обмотку, фазосдвигающую цепь или экранированные полюса;
- двухфазные — в том числе конденсаторные;
- трёхфазные;
- многофазные;
Электрические машины такого типа широко используют для приводов всех типов технологического оборудования, электроинструментов, автоматических регуляторов. По наличию разности между скоростью вращения магнитного поля статора и частотой вращения ротора различают синхронные и асинхронные двигатели.
Универсальный коллекторный электродвигатель
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном, и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127, 220 В, для постоянного 110, 220 В. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 Гц не позволяют получить частоту вращения выше 3000 об/мин.
Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока. Строго говоря, универсальный коллекторный двигатель является коллекторным электродвигателем постоянного тока с последовательно включёнными обмотками возбуждения (статора), оптимизированным для работы на переменном токе бытовой электрической сети. Такой тип двигателя независимо от полярности подаваемого напряжения вращается в одну сторону, так как за счёт последовательного соединения обмоток статора и ротора смена полюсов их магнитных полей происходит одновременно и результирующий момент остаётся направленным в одну сторону.
Для возможности работы на переменном токе применяется статор из магнитно-мягкого материала, имеющего малый гистерезис (сопротивление перемагничиванию). Для уменьшения потерь на вихревые токи статор выполняют наборным из изолированных пластин. Особенностью (в большинстве случаев — достоинством) работы такого двигателя именно на переменном токе (а не на постоянном такого же напряжения) является то, что в режиме малых оборотов (пуск и перегрузка) индуктивное сопротивление обмоток статора ограничивает потребляемый ток и соответственно максимальный момент двигателя (оценочно) до 3—5 от номинального (против 5—10 при питании того же двигателя постоянным током). Для сближения механических характеристик у двигателей общего назначения может применяться секционирование обмоток статора — отдельные выводы (и меньшее число витков обмотки статора) для подключения переменного тока.
В отдельную группу выделяют универсальные электродвигатели, которые могут работать от сети переменного тока и от источников постоянного напряжения. Они используются в электроинструментах, бытовой технике, а также других маломощных устройствах. Конструкция такой электрической машины принципиально не отличатся от двигателя постоянного тока. Главное отличие – конструкция магнитной системы и обмоток ротора. Магнитная система состоит из изолированных друг от друга секций для снижения магнитных потерь. Обмотка ротора такой машины поделена на 2 части. При питании от переменного тока напряжение подается только на ее половину. Это делается в целях снижения радиопомех, улучшения условий коммутации.
К преимуществам таких машин относятся:
- Высокая скорость вращения. Универсальные электродвигатели развивают скорость до 10 000 об/мин и более.
- Питание от переменного и постоянного напряжения. Двигатели такого типа широко применяют для электроинструментов, имеющих дополнительные аккумуляторные батареи.
- Возможность регулирования скорости без использования дополнительных устройств.
Однако, такие электромашины имеют свои недостатки:
- Ограниченная мощность.
- Необходимость обслуживания коллекторного узла.
- Тяжелые условия коммутации при питании от переменного напряжения из-за наличия трансформаторной связи между обмотками.
- Электромагнитные помехи при подключении к сети переменного тока.
Каждый тип двигателя имеет свои достоинства и недостатки. Выбор электрической машины для привода любого оборудования делается исходя из условий эксплуатации, требуемой частоты вращения, экономической целесообразности, типа нагрузки и других параметров.
Асинхронные электродвигатели
Благодаря дешевизне и простоте конструкции электрические машины такого типа получили самое широкое распространение. Их принципиальное отличие – наличие так называемого скольжения. Это разность между частотой вращения магнитного поля неподвижной части электрической машины и скоростью вращение ротора. Напряжение на вращающейся части индуцируется за счет переменного магнитного поля обмоток статора двигателя. Вращение вызывает взаимодействие поля электромагнитов неподвижной части и магнитного поля ротора, возникающего под влиянием наведенных в нем вихревых токов. По особенностям обмоток статора выделяют:
- Однофазные двигатели переменного тока. Двигатели такого типа требуют для пуска наличия внешнего фазосдвигающего элемента. Это может быть пусковой конденсатор или индуктивное устройство. Область применения однофазных двигателей – маломощные приводы.
- Двухфазные электрические машины. Такие двигатели имеют 2 обмотки со смещенными относительно друг друга фазами. Их также используют для бытовых устройств и оборудования, имеющего небольшую мощность.
- Трех- и многофазные электродвигатели. Наиболее распространенный тип асинхронных машин. Электрические двигатели такого типа имеют от 3-х и более обмоток статора, сдвинутых по фазе на определенный угол.
По конструкции ротора асинхронные электрические машины делят на двигатели с короткозамкнутым и фазным ротором.
Обмотка ротора электрических машин первого типа представляет собой несколько неизолированных стержней, выполненных из сплавов меди или алюминия, замкнутых с двух сторон кольцами (конструкция “беличья клетка”). Асинхронные двигатели такого типа обладают следующими преимуществами:
- Достаточно простая схема пуска. Такие электрические машины можно подключать непосредственно к электрической сети через аппараты коммутации.
- Допустимость кратковременных перегрузок.
- Возможность изготавливать электрические машины высокой мощности. Двигатель такого типа не содержит скользящих контактов, препятствующих наращиванию мощности.
- Относительно простое ТО и ремонт. Асинхронные электромашины имеют несложную конструкцию.
- Невысокая цена. Двигатели асинхронного типа стоят дешевле синхронных машин и ДПТ.
Электрические машины с короткозамкнутым ротором имеют свои недостатки:
- Предельная скорость вращения составляет не более 3000 об/мин при входе в синхронный режим.
- Технически сложная реализация регулирования частоты вращения.
- Высокие пусковые токи при прямом запуске.
Электродвигатели с фазным ротором частично лишены недостатков, присущих машинам с ротором конструкции “беличья клетка”. Вращающаяся часть электрической машины такого типа имеет обмотки, соединенные в схему “звезда”. Напряжение подводится к обмотке через 3 контактных кольца, закрепленных на роторе и изолированных от него.
Такие электродвигатели обладают следующими достоинствами:
- Возможность ограничивать пусковые токи при помощи резистора, включенного в цепь электромагнитов ротора.
- Больший, чем у электромашин с короткозамкнутым ротором, пусковой момент.
- Возможность регулировки скорости.
Недостатками таких двигателей являются относительно большие габариты и масса, высокая цена, более сложный ремонт и сервисное обслуживание.
Синхронный электродвигатель возвратно-поступательного движения
Принцип его работы заключается в том, что подвижная часть двигателя представляет собой постоянные магниты, закреплённые на штоке. Через неподвижные обмотки пропускается переменный ток и постоянные магниты под действием магнитного поля, создаваемого обмотками, перемещают шток возвратно-поступательным образом.
Как и в асинхронных электродвигателях, вращение ротора в синхронных машинах достигается взаимодействием полей ротора и статора. Скорость вращения ротора таких электрических машин равна частоте магнитного поля, создаваемого обмотками статора.
Обмотка неподвижной части двигателя рассчитана на питание от трехфазного напряжения. К электромагнитам ротора подключается постоянное напряжение. Различают явнополюсные и неявнополюсные обмотки. В синхронных двигателях малой мощности используют постоянные магниты.
Запуск и разгон синхронной машины осуществляется в асинхронном режиме. Для этого на роторе двигателя имеется обмотка конструкции “беличья клетка”. Постоянное напряжение подается на электромагниты только после разгона до номинальной частоты асинхронного режима. Синхронные двигатели имеют следующие особенности:
- Постоянная скорость вращения при переменной нагрузке.
- Высокий к.п.д. и коэффициент мощности.
- Небольшая реактивная составляющая.
- Допустимость перегрузки.
К недостаткам синхронных электродвигателей относятся:
- Высокая цена, относительно сложная конструкция.
- Сложный пуск.
- Необходимость в источнике постоянного напряжения.
- Сложность регулировки скорости вращения и момента на валу.
Все недостатки электрических машин переменного тока можно исправить установкой устройства плавного пуска или частотного преобразователя. Обоснование выбора того или иного устройства обусловлено экономической целесообразностью и требуемыми характеристиками электропривода.
Электродвигатели
Электрический двигатель, сокращенно электродвигатель — электрическая машина, с помощью которой электрическая энергия преобразуется в механическую, для приведения в движение различных механизмов. Электродвигатель является основным элементом электропривода.
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является — электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор — неподвижная часть, ротор — вращающаяся часть.
Стандартная конструкция вращающегося электродвигателя
У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя
1. Согласно закону Ампера на проводник с током I в магнитном поле будет действовать сила F.2. Если проводник с током I согнуть в рамку и поместить в магнитное поле, то две стороны рамки, находящиеся под прямым углом к магнитному полю, будут испытывать противоположно направленные силы F3. Силы, действующие на рамку, создают крутящий момент или момент силы, вращающий ее.4. Производимые электродвигатели имеют несколько витков на якоре, чтобы обеспечить больший постоянный момент.5. Магнитное поле может создаваться как магнитами, так и электромагнитами. Электромагнит обычно представляет из себя провод намотанный на сердечник. Таким образом, по закону электромагнитной индукции ток протекающий в рамки будет индуцировать ток в обмотки электромагнита, который в свою очередь будет создавать магнитное поле.
- Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
- Принцип работы синхронного электродвигателя
Классификация электродвигателей
|
|
|
|
|
| Простая электроника | Выпрямители, транзисторы |
Более сложная электроника |
Сложная электроника (ЧП) | |
Примечание:
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
Аббревиатура:
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- АДФР — асинхронный двигатель с фазным ротором
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СДПМП — синхронный двигатель c поверхностной установкой постоянных магнитов
- СДПМВ — синхронный двигатель со встроенными постоянными магнитами
- СРД — синхронный реактивный двигатель
- ПМ — постоянные магниты
- ЧП — частотный преобразователь
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина — вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.
Универсальный электродвигатель
Может работать на переменном и постоянном токе. Широко используется в ручном электроинструменте и в некоторых бытовых приборах (в пылесосах, стиральных машинах и др.). В США и Европе использовался как тяговый электродвигатель. Получил большое распространение благодаря небольшим размерам, относительно низкой цены и легкости управления.
Коллекторный электродвигатель постоянного тока
Электрическая машина, преобразующая электрическую энергию постоянного тока в механическую. Преимуществами электродвигателя постоянного тока являются: высокий пусковой момент, быстродействие, возможность плавного управления частотой вращения, простота устройства и управления. Недостатком двигателя является необходимость обслуживания коллекторно-щеточных узлов и ограниченный срок службы из-за износа коллектора.
- С постоянными магнитами
- С обмоткой возбуждения
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина — вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].
Асинхронный электродвигатель
Наиболее распространенный электродвигатель в промышленности. Достоинствами электродвигателя являются: простота конструкции, надежность, низкая себестоимость, высокий срок службы, высокий пусковой момент и перегрузочная способность. Недостатком асинхронного электродвигателя является сложность регулирования частоты вращения.
- Однофазный
- Двухфазный
- Трехфазный
Cинхронный электродвигатель
Синхронные двигатели обычно используются в задачах, где требуется точное управление скоростью вращения, либо где требуется максимальное значение таких параметров как мощность/объем, КПД и др.
- С обмоткой возбуждения
- С постоянными магнитами
- Реактивный
- Гистерезисный
- Реактивно-гистерезисный
- Шаговый
Специальные электродвигатели
Серводвигатель
Серводвигатели не являются отдельным классом двигателей. В качестве серводвигателя могут использоваться электродвигатели постоянного и переменного тока с датчиком положения ротора. Серводвигатель используется в составе сервомеханизма для точного управления угловым положением, скоростью и ускорением исполнительного механизма. Для работы серводвигатель требует относительно сложную систему управления, которая обычно разрабатывается специально для сервопривода.
Дисковый двигатель
Двигатель с полым (немагнитным) ротором
Особенностью двигателей с полым ротором является отсутствие магнитопровода в конструкции ротора
Сравнение электродвигателей
| Универсальный |
|
|
|
|
| КДПТ |
|
|
|
Основные параметры электродвигателя
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- Механическая характеристика
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.

,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1 [4]
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
- Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.

,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].

,
- где s – расстояние, м
Для вращательного движения

,
- где

– угол, рад,

,
- где

– углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.

,
- где

– коэффициент полезного действия электродвигателя, - P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (механическая), Вт
- При этом потери в электродвигатели обусловлены:
- электрическими потерями — в виде тепла в результате нагрева проводников с током;
- магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
Частота вращения

- где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением

,
- где

– угловое ускорение, с-2 [2]

,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Ток
Начальный пусковой ток — максимальный действующий ток, потребляемый заторможенным двигателем при питании от питающей сети с номинальным значением напряжения и частоты.
—>
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.

,
- где

– постоянная времени, с
Механическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Характеристики электродвигателя
Качество работы двигателей определяется их статическими и динамическими характеристиками. Статические характеристики определяют значения электромагнитного момента, КПД, тока и т.д. в установившемся режиме работы. Динамические характеристики относятся к изменениям этих величин в процессе работы.
Механические
—>
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.
- Сравнение механических характеристик электродвигателей разных типов при ограниченном токе статора
- Зависимость мощности от скорости вращения вала для двигателей разных типов при ограниченном токе статора
| Постоянство мощности во всем диапазоне скоростей | |||||
| Момент к току статора | |||||
| Эффективность (КПД) во всем рабочем диапазоне | |||||
| Вес |
Примечание:Оранжевый цвет — низкий показатель, желтый цвет — средний показатель, светло-желтый цвет — высокий показатель.Аббревиатура:
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- СДПМП — синхронный двигатель c поверхностной установкой постоянных магнитов
- СДПМВ — синхронный двигатель со встроенными постоянными магнитами
- СРД-ПМ — синхронный реактивный двигатель с постоянными магнитами (синхронный гибридный двигатель)
- СДОВ — синхронный двигатель с обмоткой возбуждения
В соответствии с выше приведенными показателями гибридный синхронный электродвигатель, а именно синхронный реактивный электродвигатель со встроенными постоянными магнитами, является наиболее подходящим для применения в качестве тягового электродвигателя в автомобилестроении (выбор проводился для концепта автомобилей BMW i3 & BMW i8). Использование реактивного момента обеспечивает высокую мощность в верхнем диапазоне скоростей. Более того такой двигатель обеспечивает очень высокую эффективность (КПД) в широком рабочем диапазоне [7].
Области применения электродвигателей
Электродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии [6].
- Электродвигатели используются повсеместно, основные области применения:
- промышленность: насосы, вентиляторы, компрессоры, конвейеры, движущая сила для других машин и др.
- строительство: насосы, вентиляторы, конвейеры, лифты, системы отопления, вентиляции и кондиционирование воздуха и др.
- потребительские устройства: холодильники, кондиционеры, персональные компьютеры и ноутбуки (жесткие диски, вентиляторы), пылесосы, стиральные машинки, миксеры и др.
| Системы водоснабжения и водоотведения |
| Системы перекачки охлажденной или нагретой воды, системы отопления, ОВК2, системы полива |
| Системы канализации |
| Перекачка нефтепродуктов |
| Приточно-вытяжная вентиляция, ОВК2, вентиляторы |
| Системы вентиляции, холодильные и морозильные установки, ОВК2 |
| Накопление и распределение сжатого воздуха, пневматические системы |
| Системы сжижения газа, системы перекачки природного газа |
| Прокатный стан, станки: обработка металла, камня, пластика |
| Прессовое оборудование: обработка алюминия, пластиков |
| Обработка текстиля: ткачество, стирка, сушка |
| Смешивание, взбалтывание: еда, краски, пластики |
| Пассажирские лифты, эскалаторы, конвейеры |
| Грузовые лифты, подъемные краны, подъемники, конвейеры, лебедки |
| Транспортные средства: поезда, трамваи, троллейбусы, автомобили, электромобили, автобусы, мотоциклы, велосипеды, зубчатая железная дорога, канатная дорога |
| Вентили (открыть/закрыть) |
| Серво (установка положения) |
| Вентили |
| Производство |
| Роботы |
Примечание:
- ЭД — электродвигатель
- ОВК — системы отопления, вентиляции и кондиционирование воздуха
Производители электродвигателей
- Российские производители электродвигателей
- Производители электродвигателей ближнего зарубежья
- Производители электродвигателей дальнего зарубежья
Российские производители электродвигателей
| Краснодарский край | Армавирский электротехнический завод | |||||||||
| Свердловская область | Баранчинский электромеханический завод | |||||||||
| Владимир | Владимирский электромоторный завод | |||||||||
| Санкт-Петербург | ВНИТИ ЭМ | |||||||||
| Москва | ЗВИ Московский электромеханический завод имени Владимира Ильича |
|||||||||
| Пермь | ИОЛЛА | |||||||||
| Республика Марий Эл | Красногорский завод «Электродвигатель» | |||||||||
| Воронеж | МЭЛ | |||||||||
| Новочеркасск | Новочеркасский электровозостроительный завод | |||||||||
| Санкт-Петербург | НПО «Электрические машины» | |||||||||
| Томская область | НПО Сибэлектромотор | |||||||||
| Новосибирск | НПО Элсиб | |||||||||
| Удмуртская республика | Сарапульский электрогенераторный завод | |||||||||
| Киров | Электромашиностроительный завод Лепсе | |||||||||
| Санкт-Петербург | Ленинградский электромашиностроительный завод | |||||||||
| Псков | Псковский электромашиностроительный завод | |||||||||
| Ярославль | Ярославский электромашиностроительный завод |
Аббревиатура:
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- АДФР — асинхронный двигатель с фазным ротором
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СРД — синхронный реактивный двигатель
- СГД — синхронный гистерезисный двигатель
- УД — универсальный двигатель
- КДПТ — коллекторный двигатель постоянного тока
- КДПТ ОВ — коллекторный двигатель постоянного тока с обмотками возбуждения
- КДПТ ПМ — коллекторный двигатель постоянного тока с постоянными магнитами
Производители электродвигателей ближнего зарубежья
| Беларусь | Могилевский завод «Электродвигатель» | |||||||||
| Беларусь | Полесьеэлектромаш | |||||||||
| Украина | Харьковский электротехнический завод «Укрэлектромаш» | |||||||||
| Молдова | Электромаш | |||||||||
| Украина | Электромашина | |||||||||
| Украина | Электромотор | |||||||||
| Украина | Электротяжмаш |
Производители электродвигателей дальнего зарубежья
| Швейцария | ABB Limited | |||||||||
| США | Allied Motion Technologies Inc. | |||||||||
| США | Ametek Inc. | |||||||||
| США | Anaheim automation | |||||||||
| США | Arc System Inc. | |||||||||
| Германия | Baumueller | |||||||||
| Словения | Domel | |||||||||
| США | Emerson Electric Corporation | |||||||||
| США | General Electric | |||||||||
| США | Johnson Electric Holdings Limited | |||||||||
| Германия | Liebherr | |||||||||
| Швейцария | Maxon motor | |||||||||
| Япония | Nidec Corporation | |||||||||
| Германия | Nord | |||||||||
| США | Regal Beloit Corporation | |||||||||
| Германия | Rexroth Bosch Group | |||||||||
| Германия | Siemens AG | |||||||||
| Бразилия | WEG |
Типы электродвигателей, их разновидности, свойства, характеристики
Электрическим двигателем называют машину, которая преобразует электрическую энергию в механическую. Обычно механическая работа выражается во вращении вала. Работают эти устройства от различных источников питания и хотя выполняют одну задачу, имеют определённые отличия, которые обуславливают область их применения.
Ведь не зря же в холодильники ставят одни моторы, в вентиляторы – другие, в стиральные машины, вообще, третьего вида. Для лучшего понимания рассмотрим виды электродвигателей и чем они отличаются друг от друга. Это поможет понять логику выбора того или иного движка для каждого из устройств.
Виды электродвигателей: классификация
Жёсткой классификации электродвигателей нет, но различать их можно по нескольким параметрам. Основные – тип питания и наличие скользящего контакта. Эти позиции можно считать ключевыми и по ним проще ориентироваться. В общем-то, видов электродвигателей не так и много – синхронные, асинхронные, постоянного тока, вентильные. Вот, пожалуй, всё. Другое дело, что в большинстве «категорий» есть достаточно вариантов, которые значительно меняют свойства и характеристики. Но с этим придётся разбираться применительно к каждой конструкции.

Электрические двигатели отличаются типом питания, устройством и назначением
Итак, рассмотрим виды электродвигателей по виду питающего напряжения. Они бывают:
- постоянного тока;
- переменного тока:
- однофазное питание;
- трехфазное питание;
- универсальные.
Пояснений требует только универсальный тип. Такой электродвигатель может работать как от постоянного, так и от переменного напряжения. По сути, один вид – универсальный коллекторный двигатель с обмотками возбуждения. К двигателям переменного тока относятся синхронные, асинхронные. На постоянном токе работают коллекторные и вентильные.
Наиболее распространённые виды электродвигателей
По способу передачи электропитания все электродвигатели можно разделить на две группы:
- с коллектором (щёточные);
- без коллектора (бесщёточные).
Бесщёточные электродвигатели требуют меньше обслуживания, работают тише, более надёжны. К ним относятся асинхронные с короткозамкнутым ротором (работают от переменного напряжения), вентильные (питаются постоянным напряжением). Остальные имеют коллектор и щётки, через которые на обмотки катушек подаётся напряжение.
Постоянного тока
Двигатели постоянного тока появились еще в конце 19 века. С некоторыми изменениями они используются и сегодня и притом они популярны. Например, вибрирование в современном смартфоне обеспечивает именно двигатель постоянного тока, очень маленький и мощностью в милли ватты, но все же. В большей части игрушек тоже стоят такие движки. Но это не значит, что их не используют в серьёзной технике, ещё как используют. Самые мощные стоят в качестве тяговых на электровозах. У них мощность исчисляется сотнями киловатт (больше 800), а питаются они от напряжения 1,5 кВ.
Типы электромоторов постоянного тока
Коллекторные
Коллекторный двигатель постоянного тока, как и все другие, состоит из неподвижной (статор) и подвижной (якорь) части. На статоре установлены магнитные полюса. Для маломощных моделей ставят постоянные магниты, для мощных добавляют обмотки (называются обмотками возбуждения), которые усиливают магнитное поле.
Ротор представляет собой магнитопровод из металлических пластин, в пазы которого уложены витки медного провода – роторные обмотки. Концы роторных обмоток выведены на коллектор, который представляет собой медные пластины в виде секторов цилиндра. Пластины изолированы друг от друга и от вала, на котором закреплены. Концы обмоток выводятся на коллекторные пластины. Вторая часть коллекторного узла – графитовые щётки со щеткодержателем. Щётки прижимаются к коллекторным пластинам, но не мешают вращению якоря.
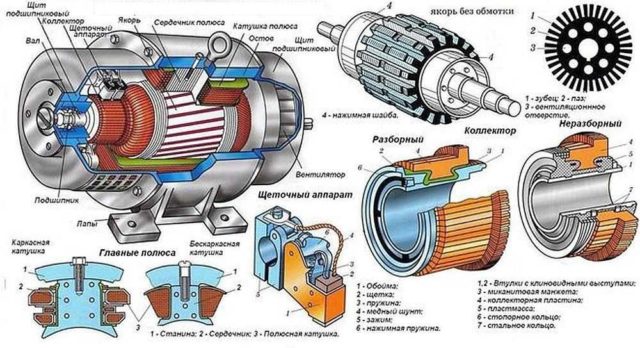
Устройство двигателя постоянного тока коллекторного типа
На щетки подаётся напряжение. В определённый момент времени они имеют контакт с какой-то парой пластин на коллекторе (редко щеток бывает четыре). Эта пара пластин подключена к роторным обмоткам, то есть, через щетки на обмотку подаётся питание. Вокруг якоря возникает магнитное поле, которое взаимодействует с магнитным полем статора. Результирующий вектор этого взаимодействия «толкает» якорь, заставляя его вращаться.
Вал прокручивается, щетки контактируют с другой парой пластин, передавая потенциал на другие обмотки, которое проталкивают якорь дальше. Так и работает коллекторный двигатель постоянного тока, а более подробно в предыдущей статье.
Универсальный
В большей части бытовой техники, которая работает от сети, стоит универсальный коллекторный двигатель. Его отличия от описанного выше незначительны. Как может одна и та же конструкция работать и на постоянном и на переменном напряжении? Всё из-за того, что в этой машине взаимодействуют магнитные поля полюсов и роторных обмоток. Все знают, что поменять направление вращения якоря просто: надо изменить полярность на полюсах или на роторе. А что получится, если их поменять сразу и там, и там? Ничего. Якорь продолжит движение в прежнем направлении. На этом и основана работа коллекторного электродвигателя на переменном токе.
Универсальный коллекторный двигатель в разрезе
Обмотки возбуждения и якоря соединяются последовательно, так, что полярность питания на них меняется практически в одно и то же время. Единственное, что пришлось изменить в универсальном двигателе – сделать сердечник якоря шихтованным. Это необходимо чтобы стабилизировать взаимодействие магнитных полей якоря и полюсов (с обмотками возбуждения).
Достоинства, недостатки, область применения
Почему коллекторные двигатели ставят в большей части бытовой и строительной техники? На то есть несколько причин. Первая: они могут разгоняться до высоких скоростей – до 10 тыс.об/мин. По сравнению с 3 тыс. об/мин, которые развивают асинхронные их ближайшие конкуренты, а это очень неплохо. Вторая причина популярности – ими легко управлять. Частота вращения напрямую зависит от приложенного напряжения, а момент от тока якоря. До появления полупроводников и создания частотных преобразователей, это был единственный тип электродвигателей, который позволял легко и достаточно точно управлять скоростью. Третья причина широкого применения, несложная конструкция и относительно небольшая цена. Четвёртая – они могут иметь хороший крутящий момент даже на небольших оборотах.
Один из популярных видов электродвижков — коллекторный двигатель
Все эти свойства определили широкую область применения коллекторных двигателей постоянного тока. Они стоят на стиральных машинах, в дрелях, миксерах и т.д. Везде, где требуются высокие скорости, возможность плавной регулировки, хороший крутящий момент.
Но наличие щеток, которые искрят и стираются, вносит свои коррективы. Этот узел требует постоянного ухода, часто щетки приходится заменять, коллектор чистить. Кроме того, он является причиной ещё двух неприятных моментов. Первая – шумная работа. Для строительной техники или промышленного оборудования это, возможно, и не очень критично, но для бытовой – существенный минус. Вторая неприятность – щетки перескакивают с одной пары на другую, так что потребление тока получается импульсным, что плохо влияет на параметры питания и создаёт радиопомехи. Это оказывает влияние на работающие рядом приборы с радиоуправлением. Это не только игрушки, но и разного рода пульты ДУ. Для сглаживания этих скачков на входе ставят конденсаторы, они сглаживают пульсации и убирают помехи.
Вентильные электродвигатели
Эти двигатели называют ещё вентильно-индукторными, безколлекторным или безщеточными. Бывают вентильные двигатели двух типов – «обычный» и с самовозбуждением. Причем отличаются и по устройству и по функциям.
Вентильные двигатели независимо от типа предусматривают электронное управление
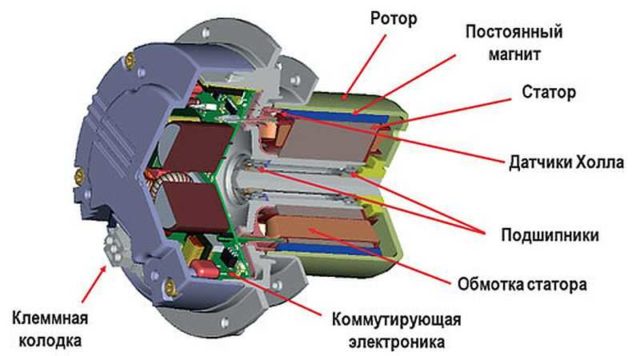
Вентильно-индукторный двигатель
Если сравнивать виды электродвигателей по размеру, вентильные будут самыми маленькими. Что характерно, работают они от постоянного тока, причём питаются им статорные обмотки, ротор обмоток не имеет, а сделан из постоянных магнитов. Причём и ротор, и статор имеют зубчатое строение. В «комплект» входит датчик холла, небольшой современный контроллер, который определяет положение ротора и в зависимости от его положения подаёт питание на ту или другую пару обмоток на статоре. То есть, вентильный двигатель управляется при помощи электронного прибора.
Конструкция вентильного безколлекторного электродвигателя
Принцип работы, наверное, уже понятен. Питание подаётся на одну пару обмоток, вокруг неё возникает магнитное поле. К этому полю притягивается ближайший полюс магнита. Далее, питание переключается на следующую пару обмоток, магнит притягивается туда. Так и получается вращение ротора. Чем быстрее переключается питание, тем быстрее скорость вращения ротора. Как видим, никаких щеток, только магнитная индукция. Это и есть основной плюс, а минус – в «пульсирующем» характере крутящего момента. Потому вентильно-индукционные двигатели не применяются в транспорте, мало кому понравиться, если колёса будут прокручиваться рывками. Тем не менее рассматривая эти виды электродвигателей, приходим к выводу, что этот имеет четыре существенных плюса: простота конструкции, хорошая управляемость скоростью, отсутствие коллектора и четвёртый – малые габариты. Всё это позволяет заменять ими асинхронные движки в некоторых случаях.
С независимым возбуждением
Этот вид электродвигателей стоит выделить отдельно, так как он значительно отличается как по устройству, так и по характеристикам и области применения. Начнём с того, что ротор состоит из двух отдельных магнитных пакетов, разнесённых на некотором расстоянии друг от друга. Полюса двух пакетов ориентированы так, чтобы результирующий момент был равен нулю (согласованное положение). Обмотка возбуждения крепится к статору хотя и обмотана вокруг ротора, но его она не касается. Магнитная система статора также собрана из металлических пластин. По характеру трёхфазная распределённая, три фазных обмотки со смещением друг относительно друга на 120°. Обмотка статора по размерам слегка больше либо равна собранному ротору (оба пакета охватывает магнитное поле).
Вентильно-индукционный электродвигатель с самовозбуждением
Питание подаётся на одну из обмоток статора. Поле, наводимое, в роторе поворачивает его так, чтобы оно совпало с полем статора. Причём поле одновременно наводится в двух пакетах, так что движение не такое скачкообразное, как у предыдущей модели. Питание переключается на следующую обмотку, вращение продолжается.
Чем хорош этот вид электродвигателей? Плюсов много. Легко управлять скоростью вращения, как у синхронных машин с обмоткой возбуждения, доступно векторное управление. Можно увеличивать или уменьшать скорость, регулировать момент. В нём нет магнитов, которые стоят немало, да ещё могут размагнититься. И еще один плюс, нет коллектора и щеток. Минус, все-таки есть. Этот вид электродвигателей нельзя запитать напрямую от сети – требуется преобразователь. И ещё, он имеет более сложную конструкцию, чем описанный выше вариант. Зато крутящий момент более плавный и практически линейный.
Переменного тока
Электрические двигатели переменного тока бывают синхронными и асинхронными. Чем отличаются эти виды электродвигателей? Разница в том, что у синхронных ротор вращается с той же скоростью, с которой изменяется поле статора, в асинхронных моделях скорость ротора отличается.
Есть два типа двигателей переменного тока – с синхронным и асинхронным вращением ротора
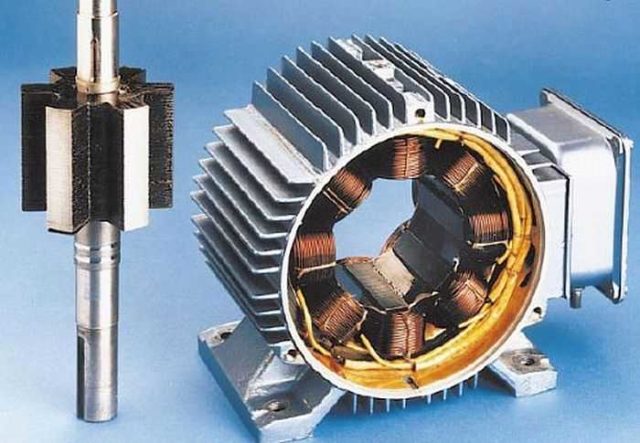
Асинхронный двигатель переменного тока
В устройствах, которые питаются от трехфазной сети обычно ставят асинхронные движки. Так, что на производстве стоят именно они. В этих машинах в статор отдельная электромагнитная система. Внутрь корпуса вставляются пластины, в пазах которых располагаются фазные обмотки. Обычно фаз в статоре три, но может быть две, а может и много.
Ротор может быть двух типов – короткозамкнутый или фазный. Короткозамкнутый может быть цельнометаллическим (последние модели) или состоять из «беличьей» клетки с залитыми алюминием промежутками между стержнями клетки. Ротор вставляется в статор, между ними оставляют минимальный зазор, не более пары миллиметров даже для самых мощных. На статор подается напряжение, которое формирует вращающееся магнитное поле. Ротор попадает в зону действия магнитного поля, в нем наводятся токи. Результирующее поле имеет определённое направление, так что ротор начинает вращение. Так как поле возникает путём индукции, электрического контакта ротора со статором нет, нет коллектора и щеток. Вал фиксируется только в крышках статора на подшипниках. Этот двигатель относится к группе бесщеточных (безколлекторных).
Асинхронный двигатель с разными роторами
Асинхронный двигатель с фазным ротором имеет коллекторный узел. На вал надевают магнитопровод из наборных пластин с ячейками под три фазные обмотки. Питание на обмотки подаётся через коллекторный узел, в них поочерёдно возникает магнитное поле, которое вкладывается с магнитным полем статора. Благодаря этому возникает вращение.
Особенности однофазных моделей
В однофазном асинхронном двигателе в статоре располагают две обмотки: она фазная, вторая вспомогательная или стартовая. Она нужна для «разгона» ротора, чтобы придать ему начальное вращение. Для обеспечения «отставания» включается стартовая обмотка через конденсатор. Так что часто такой тип асинхронника называют конденсаторным двигателем. Хотя, по сути, двигатель всё тот же асинхронный, но двухфазный.
Такие двигатели не могут развивать достаточного крутящего момента, потому применяются там, где это не требуется, например в вытяжных вентиляторах. Другие виды электродвигателей в этой области не применяют, так как большой крутящий момент тут излишен.
Достоинства, недостатки, область применения
Как уже говорили, асинхронные двигатели популярны и в основном модели с короткозамкнутым ротором. Плюсов несколько. Первый – нет коллектора, что упрощает конструкцию, мотор требует более простого и редкого обслуживания. Второй – их можно подключать к сети напрямую. Во время старта потребление тока сильно возрастает (в 3-7 раз по сравнению с номинальным), го такие перегрузки допустимы. Третий – конструкция проста и следовательно недорога.
Область применения асинхронных двигателей промышленные процессы, оборудование. Особенно там, где нет необходимости в высоких скоростях и в изменении скорости. Максимальная скорость, которую может развить подобный движок – 3 тыс. об /мин. Не так много, но для большинства оборудования достаточно. Регулируется скорость у такого движка слабо. Можно понизить напряжение и скорость уменьшится. Но если напряжение будет слишком низким, вырастет отставание скорости ротора от скорости магнитного поля, что приведёт к перегреву и двигатель может перегореть.
Область применения двигателей переменного тока – приводить в действие оборудование на производстве
В настоящее время решена проблема регулирования скорости асинхронных двигателей. Их используют совместно с преобразователями частоты, подавая напряжение с них или встраивают этот блок в конструкцию, получая так называемые инверторные двигатели. В большинстве случаев, это именно асинхронники, питание которых осуществляется через встроенный преобразователь. Что позволяет менять скорость в ещё более широких пределах, чем это позволяет делать двигатель постоянного тока. Причём может регулироваться и момент, уходит проблема стартовых токов, выключать движок тоже можно «мягко».
Синхронные электродвигатели
Статор синхронного двигателя переменного тока сделан практически так же, как и асинхронного. Разница между ними в устройстве ротора. Он состоит из постоянных магнитов. Они могут быть закреплены на поверхности или встроены внутрь. Так что виды электродвигателей, синхронный от асинхронного, можно отличить по ротору.
Когда на обмотки статора подаётся питание, возникает вращающееся магнитное поле. Магнитное поле ротора постоянное и при их взаимодействии возникает крутящий момент, который и «проталкивает» ротор. Во время работы постоянное поле магнитов на роторе «сцепляется» с вращающимся магнитным полем статора, потому их скорости вращения одинаковы и скоростью ротора легко управлять. Но это явление затрудняет пуск. Ротор «сцепится» с полем статора только, если будет иметь ту же скорость.
Ротор синхронного двигателя постоянного тока сделан из магнитов
У синхронных электродвигателей есть одна проблема – их сложно завести. Скорость вращения ротора должна быть равна скорости поля статора или так, или никак. Сразу, со старта он развить такую скорость просто не может, потому поле статора просто «соскальзывает». В результате ротор, при старте просто подрагивает, но не вращается. Говорят двигатель «не синхронизировался». Проблема обычно решается устройством на роторе специальной пусковой обмотки асинхронного типа. С её помощью вал разгоняется, затем пусковая обмотка отключается, а постоянное поле магнитов синхронизирует частоту вращения.
Достоинства, недостатки, применение
Как вы уже, наверное, поняли, скорость синхронного двигателя никак не регулируется. В смысле, можно изменять скорость магнитного поля статора, а оно зависит от частоты. До изобретений полупроводниковых приборов это было сложно, хлопотно и неэффективно. Несмотря на стабильность работы, простоту конструкции, применялись они мало. Во-первых, трудно запустить; во-вторых, нет возможности регулировать скорость. Другие виды электродвигателей были более популярны.
С изобретением частотного преобразователя проблема исчезла. Частоту трехфазного тока с их помощью можно менять от 1 Гц до 500 Гц, так что и пределы регулировки асинхронного двигателя тоже могут быть более чем значительны. Причем характеристики этой «пары» практически такие же, как и у двигателей постоянного тока. Потому сейчас синхронные двигатели с частотными преобразователями активно заменяют другие виды электродвигателей, например, ставят вместо коллекторного привода. Пример тому стиральные машины с прямым приводом, кулеры охлаждения. Стали менять и двигатели постоянного тока, появились новые электропоезда с синхронными двигателями и частотными преобразователями.
Виды электродвигателей: какой лучше
Описаны только основные виды электродвигателей и даны краткие характеристики, очень сжато описано устройство и принцип работы. Тем не менее, уже можно сделать выводы о том, что идеального решения, причём для всех случаев, просто нет. Есть наиболее подходящее для каждого конкретного случая.
- Асинхронный электродвигатель без частотного регулирования – лучший выбор для насосов.
- Коллекторный двигатель с его регулируемыми скоростями вне конкуренции для дрелей и пылесосов. И то, в последнее время стали делать с вентильными, они без щеток, что делает работу тише, срок службы дольше, хотя цену выше. Так что, тут, как посмотреть.

Выбирать вид электродвигателя надо под каждый конкретный случай
- Для вентиляторов с длительным режимом работы выбирать приходится между асинхронных и вентильных. Но только если они не слишком мощные. Для мощных важным является возможность разделения на секции, а это проще реализовать у вентильных. И даже на кулерах стали в последнее время использовать вентильные с магнитным ротором.
В общем, чтобы ответить какой лучше, надо рассматривать совокупность условий и характеристик работы. Принимать во внимание достоинства и недостатки, перебирать все виды электродвигателей и только так можно найти оптимальный.
Общепромышленного назначения (ГОСТ Р)

Общепромышленного назначения (DIN / CENELEC)

Взрывозащищенные

Асинхронные с фазным ротором

Взрывозащищенные рудничные

Однофазные (ГОСТ Р)

Однофазные (DIN / CENELEC)

С повышенным скольжением

Со встроенным электромагнитным тормозом

Рольганговые

Высоковольтные

Крановые

Специального назначения

АВВ общего назначения с алюминиевой станиной, класс энергоэффективности IE1
АВВ общего назначения с алюминиевой станиной, класс энергоэффективности IE2
АВВ общего назначения с чугунной станиной, класс энергоэффективности IE2

Для привода осевых вентиляторов (в системах охлаждения трансформаторов)

Для привода осевых вентиляторов ПТИЧНИКИ

Для привода станков-качалок
Для частотного регулирования (АДЧР)
Погружные

Пониженной высоты (IP23)

Энергоэффективные
Термисторное реле ENERAL

Описание
Электродвигатель – это электрическая машина, которая обеспечивает слаженную и продуктивную работу любого промышленного оборудования, независимо от сферы его применения, в оптических системах, измерительной аппаратуре и разнообразных бытовых устройствах. Двигатели отлично взаимодействуют с конвейерным, вентиляционным, насосным и другими видами оборудования.
На сайте компании представлено большое количество моделей трехфазных и однофазных агрегатов, рассчитанных на продолжительную и продуктивную работу, обеспечивая при этом подачу необходимого уровня мощности и выполняя ряд специальных функций.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешевизной и надежностью. Трехфазная система представляет собой три отдельные электрические цепи, в которых действуют синусоидальные ЭДС одной и той же частоты, которые в свою очередь сдвинуты друг от друга на 120°, и создаваемые одним источником энергии. Источником энергии чаще всего выступает трехфазный генератор.
Преимущество трехфазной цепи заключается в её уравновешенности. То есть суммарная мгновенная мощность трехфазной цепи, остается величиной постоянной в течение всего периода ЭДС.
Используя трёхфазный электродвигатель, управление его динамическими параметрами может осуществляться как цифровым, так и аналоговым сигналом. Важной особенностью является и то, что ели на обмотках ротора изменить направление протекания тока, то вращаться его можно заставить в обоих направлениях. Эти факторы делают агрегаты незаменимыми в тех системах, которые требуют контроля над вращающим моментом и скоростью вращения.
Однофазный асинхронный электродвигатель переменного тока – это электрический агрегат, который подключается от бытовой однофазной сети и напряжением 220В с частотой 50 Гц. и тоже является преобразователем электрической энергии в механическую.
Для получения вращающего магнитного поля на статоре двигателя должны быть расположены как минимум две обмотки, смещенные в пространстве на определенный угол и обтекаемые переменными токами.
В соответствии с этим пусковая обмотка укладывается на статоре двигателя со смещением ее оси на 90% по отношению к оси рабочей обмотки, а сдвиг токов обеспечивается включением в ее цепь дополнительного фазосдвигающего элемента, в качестве которого могут быть использованы: активный резистор, катушка индуктивности или конденсатор. Данные двигатели используются: в приводе стиральных машин, холодильников, центрифуг, заточных и небольших обрабатывающих станков и т.д.
Отметим, что однофазные АД по сравнению с трехфазными двигателями обычно имеют несколько худшие технические характеристики. Мощность однофазного асинхронного электродвигателя составляет не более 70% от мощности трехфазного АД в том же габарите. Однофазные АД, кроме того, имеют более низкую перегрузочную способность, а так же не могут работать длительное время на холостом ходу (не более 5-10мин).
Собственникам электротранспорта компания в широком ассортименте предлагает тяговый электродвигатель. Электрические родстеры сегодня выступают достойными конкурентами бензиновых агрегатов и приобретают все большую популярность среди потребителей.
Как на переменном, так и на постоянном токе может работать универсальный коллекторный электродвигатель. Применяется он чаще всего в электроинструментах или бытовых аппаратах. Если говорить о принципе работы такого двигателя, то основным достоинством выступает то, индуктивное сопротивление обмоток в режиме малых оборотов ограничивает максимальный момент двигателя и потребляемый ток.
Для привода механизмов, отличающихся большой инерционностью, а также работающих в повторно-кратковременном режиме специально предназначены электродвигатели с повышенным скольжением. При номинальной нагрузке скольжение у таких агрегатов выше в сравнении с базовыми. Около 40% составляет критическое скольжение, обеспеченное повышением сопротивления обмотки ротора. Работают такие машины от сети трехфазного переменного тока.
Для работы в трехфазной или однофазной основе ГК ПРАКТИК предлагает разнообразные электродвигатели, технические характеристики которых подробно описаны в каталоге, с расшифровкой наименования, модификации, габаритов, серии, производителя и других данных.
Условные обозначения электродвигателей

Серия (тип) электродвигателя:
Общепромышленные электродвигатели:
АИ — обозначение серии общепромышленных электродвигателей
Р, С (АИР и АИС) — вариант привязки мощности к установочным размерам, т.е.
АИР (А, 5А, 4А, АД) — электродвигатели, изготавливаемые по ГОСТ
АИС (6А, IMM, RA) — электродвигатели, изготавливаемые по евростандарту DIN (CENELEC)
Взрывозащищенные электродвигатели: ВА, АВ, АИМ, АИМР, 2В, 3В и др
Электрические модификации:
М — модернезированный электродвигатель: АИРМ, 5АМ
Н — электродвигатель защищенного исполнения с самовентиляцией: 5АН
Ф — электродвигатель защищенного исполнения с принудительным охлаждением: 5АФ
К — электродвигатель с фазным ротором: 5АНК
С — электродвигатель с повышенным скольжением: АИРС, АС, 4АС, 5АС, АДМС и др.
Е — однофазный электродвигатель 220V: АИРЕ, АДМЕ, 5АЕУ
В — встраиваемый электродвигатель: АИРВ 100S2
П — электродвигатель для привода осевых вентиляторов в птицеводческих хозяйствах и т. д. («Птичники»): АИРП
Габарит электродвигателя (высота оси вращения):
габарит электродвигателя равен расстоянию от низа лап до центра вала в миллиметрах
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400, 450 и выше
Длина сердечника и/или длина станины:
А, В, С — длина сердечника (первая длина, вторая длина, третья длина)
XK, X, YK, Y — длина сердечника статора высоковольтных двигателей
S, L, М — установочные размеры по длине станины
Количество полюсов электродвигателя:
2, 4, 6, 8, 10, 12, 4/2, 6/4, 8/4, 8/6, 12/4, 12/6, 6/4/2, 8/4/2, 8/6/4, 12/8/6/4 и др.
Конструктивные модификации электродвигателя:
Е — электродвигатель с встроенным электромагнитным тормозом: АИР 100L6 Е У3
Е2 — электродвигатель с встроенным электромагнитным тормозом и ручкой расторможения: АИР 100L6 Е2 У3
Б — со встроенным датчиком температурной защиты: АИР 180М4 БУ3
Ж — электродвигатель со специальным выходным концом вала для моноблочных насосов: АИР 80В2 ЖУ2
П — электродвигатель повышенной точности по установочным размерам: АИР 180М4 ПУ3
Р3 — электродвигатель для : АИР 100L6 Р3
С — электродвигатель для станков-качалок: АИР 180М8 СНБУ1
Н — электродвигатель малошумного исполнения: 5АФ 200 МА4/24 НЛБ УХЛ4
Л — электродвигатель для привода лифтов: 5АФ 200 МА4/24 НЛБ УХЛ4
Климатическое исполнение электродвигателя:
У — умеренный климат
Т — тропический климат
УХЛ — умеренно холодный климат
ХЛ — холодный климат
ОМ — на судах морского и речного флота
Категория размещения:
5 — в помещении с повышенной влажностью
4 — в помещении с искуственно регулируемыми климатическими условиями
3 — в помещении
2 — на улице под навесом
1 — на открытом воздухе
Степень защиты электродвигателя:
Первая цифра: защита от твердых объектов.
| IP | определение |
| 0 | без защиты |
| 1 | защита от твердых объектов размерами свыше 50мм (например, от случайного касания руками) |
| 2 | защита от твердых объектов размерами свыше 12 мм (например, от случайного касания пальцами) |
| 3 | защита от твердых объектов размерами свыше 2,5 мм (например, инструментов, проводов) |
| 4 | защита от твердых объектов размерами свыше 1мм (например, тонкой проволоки) |
| 5 | защита от пыли (без осаждения опасных материалов) |
Вторая цифра: защита от жидкостей.
| IP | определение |
| 0 | без защиты |
| 1 | защита от вертикально падающей воды (конденсация) |
| 2 | защита от воды, подающей под углом 15º к вертикали |
| 3 | защита от воды, падающей под углом 60º к вертикали |
| 4 | защита от водяных брызг со всех сторон |
| 5 | защита от водяных струй со всех сторон |
Монтажное исполнение электродвигателя

Конструктивное исполнение по способу монтажа (крепление и сочленение) и условное обозначение для этих исполнений установлены по ГОСТ 2479.
Первая цифра в обозначении — конструктивное исполнение двигателя:
1 — электродвигатель на лапах с подшипниковыми щитами;
2 — электродвигатель на лапах с подшипниковыми щитами и фланцем на одном подшипниковом щите;
3 — электродвигатель без лап с подшипниковыми щитами и фланцем на одном подшипниковом щите;
Вторая и третья цифры в обозначении — способ монтажа двигателя.
Четвертая цифра в обозначении — исполнение вала двигателя:
1 — с одним цилиндрическим концом вала;
2 — с двумя цилиндрическими концами вала.
Общепромышленные электродвигатели изготавливаются в стандартном исполнении:
*климатическое исполнение У3 (умеренный климат, работа в помещении)
*номинальное напряжение 380V, а также 220/380V, 380/660V при частоте 50Гц — для низковольтных двигателей
*номинальное напряжение 6000V и 10000V при частоте 50Гц — для высоковольтных двигателей
*режим работы S1 (продолжительный режим работы) — по ГОСТ 28173
*степень защиты IP54, IP55 (общепромышленные, взрывозащищенные);
IP23 (защищенного исполнения);
IP10 (лифтовые) по ГОСТ 17494
Крановые электродвигатели: общая характеристика.
Серия (тип) электродвигателя:
МТ, 4МТ, АМТ, ДМТ
Обозначение ротора:
К — с короткозамкнутым ротором (отсутствие буквы обозначает — с фазным ротором)
Класс нагревостойкости изоляции:
электродвигатели изготавливаются с изоляцией класса нагревостойкости F и H по ГОСТ 8865-93.
Обозначение габарита или высоты оси вращения; длина станины и/или сердечника статора:
011, 012, 111, 112, 211, 311, 312, 411, 412, 511, 512, 611, 612, 613 — условное обозначение габарита (первая цифра) и длины станины (вторая и третья цифры) серии МТ и ДМТ
132, 200, 225, 280 — высота оси вращения серии 4МТ и АМТ в миллиметрах.
S, M, L — условное обозначение длины станины серии 4МТ, АМТ
А, В — условное обозначение длины сердечника статора серии 4МТ, АМТ
Количество полюсов электродвигателя:
6, 8, 10, 6/12, 6/16, 6/20, 4/24
Климатическое исполнение электродвигателя и категория размещения:
для крановых электродвигателей стандартно — У1;
возможно изготовление с климатическим исполнением УХЛ1, Т1
Монтажное исполнение электродвигателя
габариты 0, 1, 2, 3 и электродвигатели с высотой оси вращения 132
| 1001 | на лапах с одним цилинрическим концом вала | |||||||
| 1002 | на лапах с двумя полиэдрическими концами вала | |||||||
| 2001 | на лапах с фланцем с одним цилиндр. концом вала | |||||||
| 2002 | на лапах с фланцем с двумя цилиндр. концами вала | |||||||
Габариты 4, 5, 6 и электродвигатели с высотой оси вращения 200, 225, 280
| 1003 | на лапах с одним коническим концом вала | |||||||
| 1004 | на лапах с двумя коническими концами вала | |||||||
| 2003 | на лапах с фланцем с одним коническим концом вала | |||||||
| 2004 | на лапах с фланцем с двумя коническими концами вала | |||||||










