История изобретения
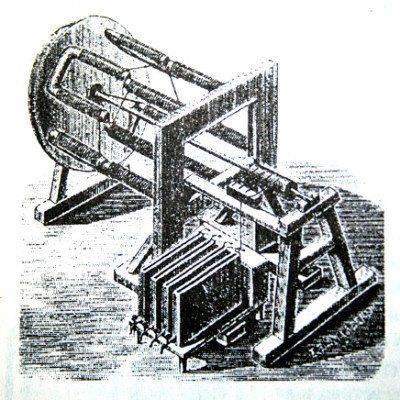
Электродвигатель Якоби.
Для того чтобы понять принцип работы электрических двигателей постоянного тока (ДПТ) мы обратимся к истории его создания. Итак, первые опытные доказательства того, что электрическую энергию можно превращать в механическую, продемонстрировал Майкл Фарадей. В 1821 году он провел опыт с проводником, опущенным в сосуд, наполненный ртутью, на дне которого располагался постоянный магнит. После подачи электричества на проводник, тот начинал вращаться вокруг магнита, демонстрируя свою реакцию на имеющееся в сосуде магнитное поле. Эксперимент Фарадея не нашел практического применения, но доказал возможность создания электрических машин, и дал старт развитию электромеханики.
Первый электрический двигатель постоянного тока, в основу которого был положен принцип вращения подвижной части (ротора) был создан русским физиком-механиком Борисом Семеновичем Якоби в 1834 году. Это устройство работало следующим образом:
- После подачи питания вокруг якоря-ротора создавалось электромагнитное поле, чьи полюса располагались напротив друг друга по правилу буравчика и отклонялись от одноименных полюсов индуктора.
- Перед тем, как электромагнитное поле якоря устанавливалось на максимальном приближении к разноименным полюсам индуктора, специальный коммутатор отключал питание, и якорь продолжал вращаться по инерции.
- После того, как якорь выходил из-под полюсов индуктора, коммутатор включал питание с обратной полярностью и появившееся «перевернутое» электромагнитное поле отталкивалось от полюсов индуктора, делая полный оборот якоря.
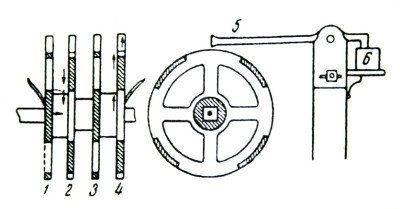
1-4 — металлические кольца, 5 — скользящий контакт, 6 — батарея
Описанный принцип использовался в двигателе, который Якоби установил на лодке с 12 пассажирами в 1839 году. Судно двигалось рывками со скоростью в 3 км/ч против течения (по другим данным — 4.5 км/ч), но успешно пересекло реку и высадило пассажиров на берег. В качестве источника питания использовалась батарея с 320 гальваническими элементами, а движение осуществлялось с помощью лопастных колес.
Дальнейшее изучение вопроса привело исследователей к разрешению массы вопросов, касаемо того, какие источники питания лучше использовать, как улучшить его рабочие характеристики и оптимизировать габариты.
В 1886 году Фрэнком Джулиан Спрэгом впервые был сконструирован электродвигатель постоянного тока, близкий по конструкции тем, которые применяются в наши дни. В нем был реализован принцип самовозбуждения и принцип обратимости электрической машины. К этому моменту все двигатели данного типа перешли на питание от более подходящего источника – генератора постоянного тока.

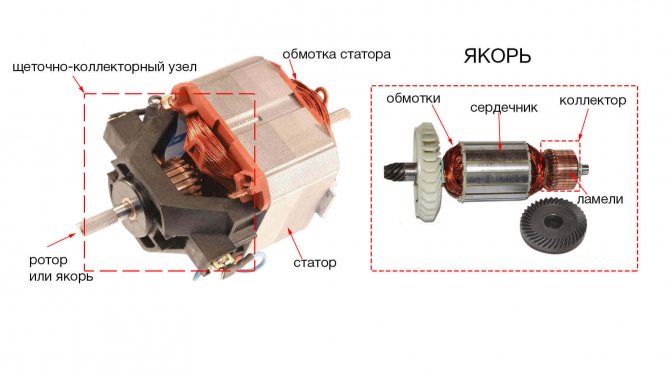
Щёточно-коллекторный узел обеспечивает электрическое соединение цепи ротора с цепями, расположенными в неподвижной части машины
Устройство и принцип работы
В современных ДПТ используется все тот же принцип взаимодействия заряженного проводника с магнитным полем. С усовершенствованием технологий устройство лишь дополняется некоторыми элементами, улучшающими производительность. К примеру, в наши дни постоянные магниты используются лишь в двигателях низкой мощности, поскольку в крупных аппаратах они занимали бы слишком много места.
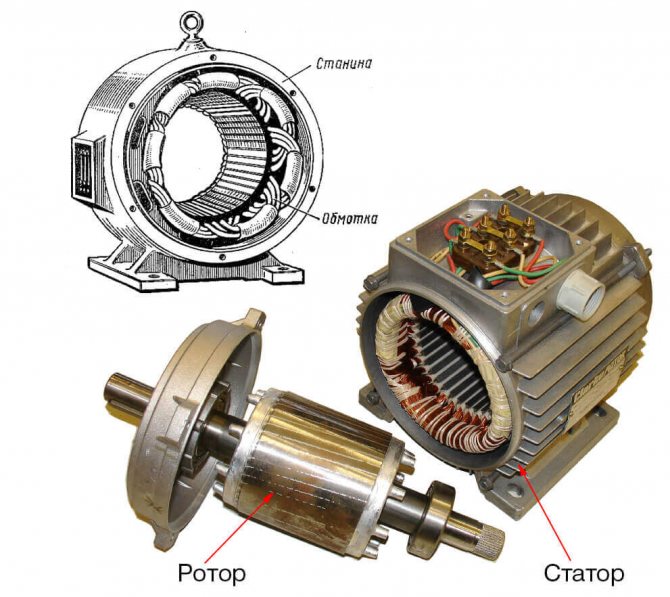
Конструкция
Итак, постоянный магнит закрепляется на корпусе двигателя, образуя вместе с ним статор, внутри которого располагается ротор. После подачи питания на обмотке якоря возникает электромагнитное поле, вступающее во взаимодействие с магнитным полем статора, это приводит к вращению ротора, жестко посаженного на вал. Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из:
- Коллектора. Он представляет собой токосъемное кольцо из нескольких секций, разделенных диэлектрическим материалом, подключается к обмоткам якоря и крепится непосредственно на валу двигателя.
- Графитовых щеток. Они замыкают цепь между коллектором и источником питания с помощью щеток, которые прижимаются к контактным площадкам коллектора прижимными пружинами.
Обмотки якоря одними концами соединяются между собой, а другими – с секциями коллектора, образуя таким образом цепь, по которой ток идет по следующему маршруту: входная щетка –> обмотка ротора -> выходная щетка.
Приведенная принципиальная схема (рис. 3) демонстрирует принцип работы примитивного электродвигателя постоянного тока с коллектором из двух секций:
- В этом примере мы будет считать стартовым положением ротора то, которое нарисовано на схеме. Итак, после подачи питания на нижнюю щетку, помеченную знаком «+», ток протекает по обмотке и создает вокруг нее электромагнитное поле.
- По правилу буравчика в левой нижней части формируется северный полюс якоря, а на правой верхней – южный. Располагаясь вблизи одноименных полюсов статора, они начинают отталкиваться, приводя тем самым ротор в движение, которое продолжается до тех пор, пока противоположные полюса не окажутся на минимальном друг от друга расстоянии, то есть придут в окончательное положение (рис. 1).
- Конструкция коллектора на данном этапе приведет к переключению полярности на обмотках якоря. В результате этого полюса магнитных полей снова окажутся на близком расстоянии и начнут отталкиваться.
- Ротор совершает полный оборот, и коллектор снова меняет полярность, продолжая его движение.

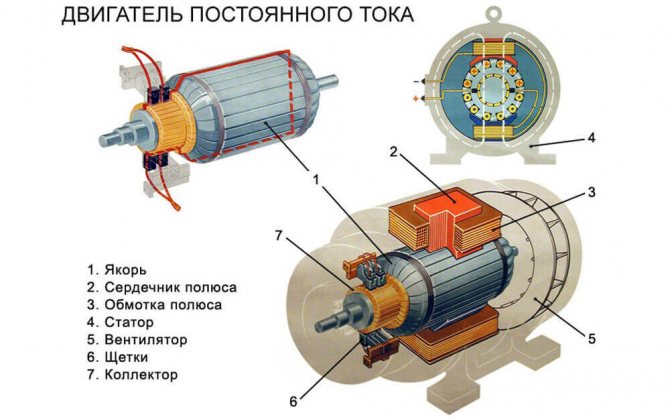
Детали электродвигателя постоянного тока
Здесь, как уже было отмечено, продемонстрирован принцип работы примитивного прототипа. В настоящих двигателях используется более двух магнитов, а коллектор состоит из большего числа контактных площадок, благодаря чему обеспечивается плавное вращение.
В высокомощных двигателях использование постоянных магнитов не представляется возможным из-за их большого размера. Альтернативой для них служит система из нескольких токопроводящих стержней, на каждой из которых имеется своя обмотка, подключаемая к питающим шинам. Одноименные полюса включаются в сеть последовательно. На корпусе может присутствовать от 1 до 4 пар полюсов, а их количеству должно соответствовать число токосъемных щеток на коллекторе.
Электродвигатели, рассчитанные на большую мощность, обладают рядом функциональных преимуществ перед более «легкими» аналогами. К примеру, здешнее устройство токосъемных щеток поворачивает их на определенный угол относительно вала для компенсации торможения вала, названного «реакцией якоря».
Основной принцип
Первоначальные прототипы двигателей данного типа были заметно проще современных аппаратов. Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя:
- Подача питания создает на обмотках якоря электромагнитное поле.
- Полюса электромагнитного поля отталкиваются от одноименных полюсов поля постоянного магнита.
- Якорь вместе с валом, на котором он закреплен, вращается в соответствии с отталкивающимся полем обмотки.
Данный алгоритм отлично работал в теории, однако на практике перед создателями первых двигателей вставали характерные проблемы, препятствовавшие функционированию машины:
- Мертвое положение, из которого двигатель невозможно запустить – когда полюса точно сориентированы друг перед другом.
- Невозможность пуска из-за сильного сопротивления или слабого отталкивания полюсов.
- Ротор останавливается после совершения одного оборота. Это связано с тем, что после прохождения половины окружности притягивание магнита не разгоняло, а тормозило вращение ротора.
Решение первой проблемы было найдено довольно быстро – для этого было предложено использовать более двух магнитов. Позднее в устройство двигателя стали включать несколько обмоток и коллекторно-щеточный узел, который подавал питание только на одну пару обмоток в определенный момент времени.
Коллекторно-щеточная система подачи тока решает и проблему торможения ротора – переключение полярности происходит до того момента, когда вращение ротора начинает замедляться. Это значит, что во время одного оборота двигателя происходит как минимум два переключения полярности.
Проблема слабых пусковых токов рассматривается ниже в отдельном разделе.
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему. Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
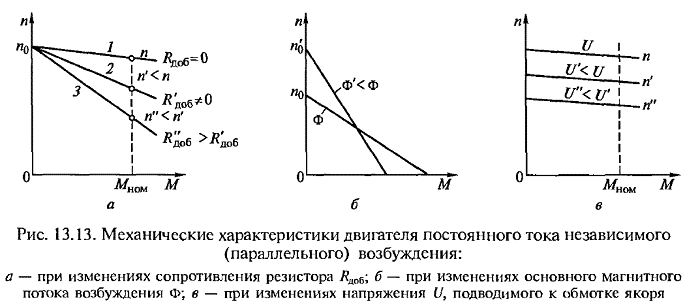
Частота вращения – одна из важнейших его характеристик. Ее регулировать можно тремя способами: изменяя поток возбуждения, изменяя величину подводимого напряжения к двигателю, изменяя сопротивление в якорной цепи.
Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
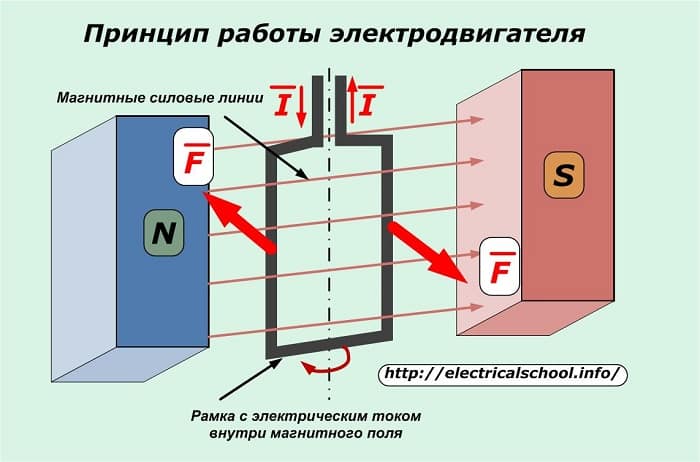
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Торможение электрического двигателя постоянного тока
Для торможения электроприводов с ДПТ также есть три варианта: торможение противовключением, динамическое и рекуперативное. Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла. Это торможение сопровождается мгновенной остановкой двигателя.
Последнее происходит, если электрический мотор, включенный в сеть, вращается со скоростью, которая выше скорости холостого хода. ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т.е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
Краткая история создания
Разные ученые пытались создать экономичный и мощный двигатель еще с первой половины 19 века. Основой послужило открытие М.Фарадея, сделанное в 1821 г. Он обнаружил, что помещенный в магнитное поле проводник вращается. Отталкиваясь от этого, в 1833 г изобретатель Томас Дэвенпорт смог сконструировать двигатель постоянного тока, а позже, в 1834 г, ученый Б.С.Якоби придумал прообраз современной модели двигателя с вращающимся валом. Устройство, более похожее на современные агрегаты, появилось в 1886 г, и до сегодняшнего дня электродвигатель продолжает совершенствоваться.
Принцип действия ДПТ
ДПТ, как и любой современный мотор, работает на основе «Правила левой руки», с которым все знакомы еще со школы и закона Фарадея. При подключении тока к нижней обмотке якоря в одном направлении, а к обмотке верхней – в другом, якорь начинает вращаться, а уложенные в его пазах проводники – выталкиваться магнитным полем статора или обмоток корпуса двигателя постоянного тока. Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.
Как работают двигатели
Принцип работы всех видов электродвигателей состоит во взаимодействии магнитных полей ротора и статора. При этом магнитное поле может создаваться постоянным магнитном или обмоткой (катушка-электромагнит).
В зависимости от мощности и типа мотора обмотки могут быть расположены только на статоре или и на статоре и на роторе. Попытаемся объяснить устройство и принцип работы для чайников в электрике.
Начнем с того, что рассмотрим устройство коллекторных электродвигателей. Например, в маленьких коллекторных двигателях постоянного тока, как для радиомоделей, на статоре расположены постоянные магниты, а в роторе намотаны катушки из медного провода. Ток к катушкам ротора такого электродвигателя подаётся через щеточный узел, состоящий из щеток и коллектора. На коллекторе расположены ламели, к которым присоединены выводы обмоток.
После включения питания ротор (якорь) начинает вращаться, на нём закреплен коллектор, а неподвижные щетки касаются попеременно разных пар ламелей коллектора. Через щетки и ламели к обмоткам ротора подаётся ток то на одну обмотку, то на другую, таким образом создавая изменяющееся магнитное поле, которое взаимодействует с полем магнита. В результате полюса вращающегося и неподвижного электромагнитов притягиваются, из-за чего и происходит вращение.
Если опустить некоторые нюансы, то чем больше ток ротора, тем больше это поле и тем быстрее вращается ротор. Однако это применимо в основном для коллекторных машин постоянного и переменного токов (они универсальны).
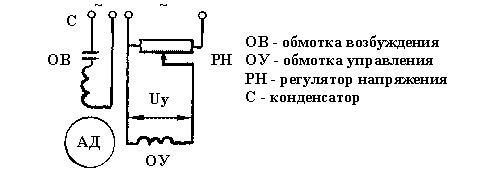
Если говорить об асинхронном двигателе (АД) с короткозамкнутым ротором — это электродвигатель переменного тока без щеток. В нем обмотки расположены на статоре (а), а ротор представляет собой стержни (б), замкнутые на коротко кольцами — так называемая беличья клетка.
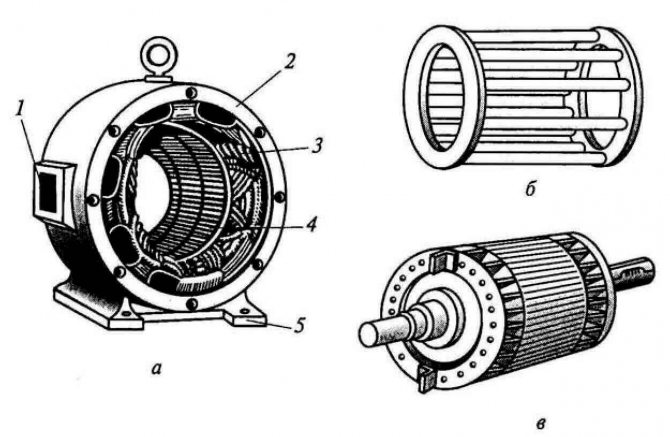
В этом случае вращающееся магнитное поле статора порождает ток в стержнях ротора, из-за которого также возникает еще одно магнитное поле. А что происходит, когда рядом расположены два магнита?
Они отталкиваются или притягиваются друг к другу. Так как ротор закреплен на концах в подшипниках, то ротор начинает вращаться. АД предназначен только для переменного тока, и скорость вращения вала у него зависит от частоты тока и числа полюсов в обмотках статора, подробнее этот вопрос мы рассмотрим в статье об асинхронных электродвигателях.
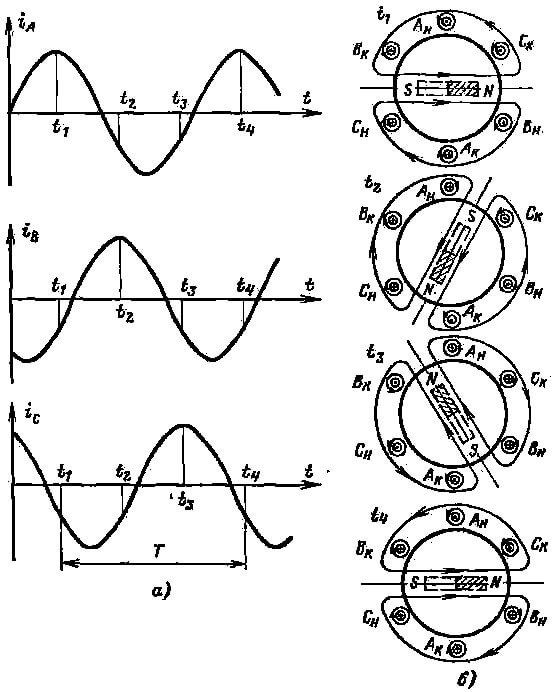
Но для начала вращения вала такого двигателя важно либо толкнуть его (придать начальную скорость), либо создать вращающееся магнитное поле. Оно создаётся с помощью расположенных определенным образом обмоток, подключенным к трёхфазной электросети (например, 380В), или с помощью пусковых и рабочих конденсаторов (в т.н. конденсаторных асинхронных двигателях).
Кроме взаимодействия магнитных полей в во вращении вала электродвигателя участвует и сила Ампера.
Читайте также: Как измерить емкость аккумуляторной батареи по формуле
Поэтому нужно понимать, что момент на валу абстрактного двигателя и число оборотов зависят от конструкции и вида электромашины, а также от силы тока и его частоты. Повторюсь, что в этой статье мы не будем углубляться подробно в особенности устройства каждого из видов и типов электродвигателей, а сделаем отдельные статьи для этого.

Стоит отметить, что асинхронные и универсальные коллекторные двигатели наиболее распространены в быту и на производстве, в приводах строительных машин. Они используются везде, как для движения промышленных механизмов, так и для автомобилей, электротранспорта и используемых в бытовой технике, вплоть до электрической зубной щетки.
Принципиальные схемы ДПТ
Двигатель переменного тока подключается просто, в отличие от ДПТ. Обычно у таких двигателей высокой и средней мощности имеются отдельные выводы в клеммной коробке (от обмотки и якоря). На якорь обычно подается полное напряжение, а на обмотку — ток, регулировать который можно реостатом или напряжением переменным. От величины тока, имеющегося на обмотке возбуждения, прямопропорционально зависят обороты двигателя переменного тока.
В зависимости от того, какая используется схема подключения электродвигателя постоянного тока, двигатель электрический может быть постоянного тока, разделяют на самовозбуждающиеся и с независимым возбуждением (от отдельного источника).
Основная классификация
Итак, электродвигатели главным образом делятся на машины, работающие от постоянного тока, а также от переменного тока. Чем отличается переменный ток от постоянного, мы рассказывали в статье: . Типы электрических двигателей рассмотрим с машин, работающих от переменки.
Двигатели переменного тока
Большинство электрических машин, используемых на производстве и в повседневной жизни, для привода лифтов, в других видах электропривода работают от переменного тока.
Двигатели переменного тока можно классифицировать следующим образом:
- асинхронные;
- синхронные.
При этом асинхронные двигатели различают либо по конструкции ротора:
- с короткозамкнутым ротором (наиболее распространены с любым числом фаз);
- с фазным ротором (только трёхфазные).
И по количеству фаз:
- однофазные (с пусковым конденсатором) используются в бытовых электровентиляторах и других маломощных устройствах;
- конденсаторные или двухфазные (это однофазные с конденсатором, который не отключается во время работы, за счет чего создаётся «вторая» фаза) используются в небольших насосах, вентиляции, на стиральных машинах типа «малютка» и старых моделей производства СССР;
- трёхфазные распространены больше всего и используются повсеместно на производстве.
Есть разные конструкции однофазных АД, в списке приведены два основных варианта!
Особенностью всех асинхронных электродвигателей является то, что частота вращения ротора немного меньше скорости вращения магнитного поля статора и равняется:
где n – число оборотов в минуту, f – частота питающей сети, p – число пар полюсов, s – скольжение, а «60» — секунд в минуте.
Таким образом частота вращения ротора определяется частотой питающей сети, конструкцией обмоток, а вернее числом пар полюсов (катушек) в ней и величиной скольжения.
Скольжение – это величина, которая характеризует насколько меньше частота вращения ротора относительно частоты вращающегося магнитного поля. При нормальных режимах работы лежит в пределах 0,01-0,06. Если говорить простым языком, то поле в статоре с одной парой полюсов вращается со скоростью:
60*50/1=3000 об/мин
При двух парах — 1500 об/мин, а при трёх парах — 1000 об/мин.
При скольжении, допустим, в 0,05, частота вращения ротора будет равняться:
3000*(1-0,05)=2850 об/мин
Для регулировки оборотов таких электродвигателей используют частотные преобразователи, так как на остальные переменные, приведенной выше формулы, мы повлиять не можем.
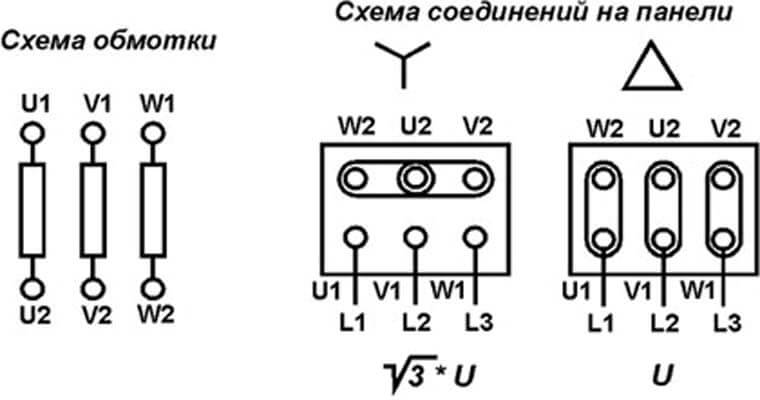
Наиболее распространены в России асинхронные двигатели с напряжением питания 220В для соединения обмоток по схеме треугольника и 380В по схеме звезды.
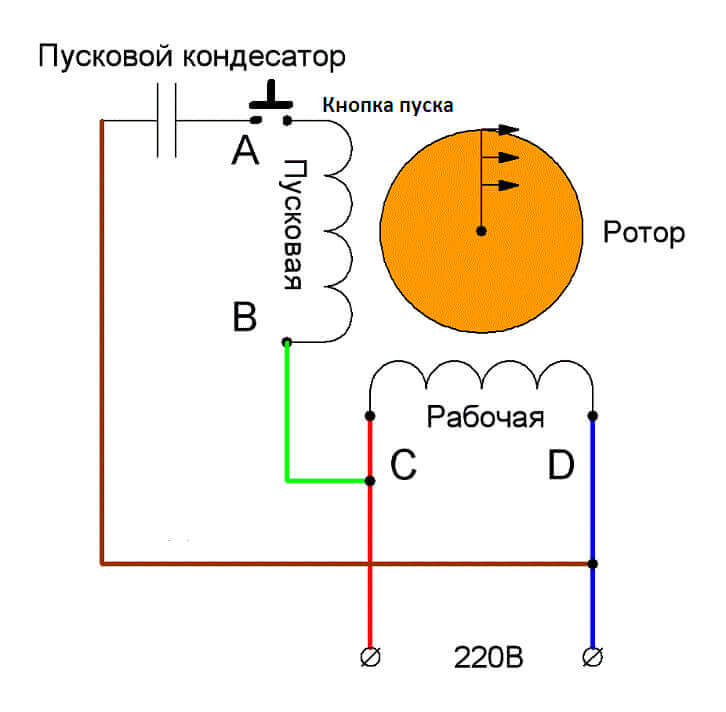
Если в трёхфазной электрической машине вращающееся поле статора создаётся расположением обмоток и сдвигом фаз в сети на 120˚, то в однофазных такого эффекта не наблюдается. Вал будет вращаться, если задать ему первоначальное вращение, крутнув вал рукой или установив фазосдвигающий конденсатор, который создаст сдвиг фазы на пусковой обмотке.
Читайте также: Как проходит установка домофона в подъезде многоквартирного дома?
Двухфазные конденсаторные двигатели устроены подобным образом, но вторая обмотка не отключается после пуска, а продолжает работать через конденсатор. Поэтому название «двухфазные» скорее относится к конструкции и схеме подключения, а не к цепям питания. И двухфазные, и однофазные рассчитаны на работе от сети 220В.
Синхронные электродвигатели (СД) почти всегда выполняются с обмоткой возбуждения на якоре, и ток возбуждения на неё передается либо через щеточный узел, либо наводится с помощью электромагнитной системы.
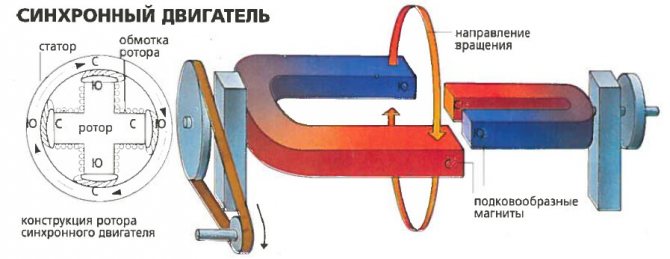
Это нужно для того, чтобы его вал вращался с частотой, совпадающей с частотой вращения поля статора. То есть такого параметра как скольжения в этом случае нет.
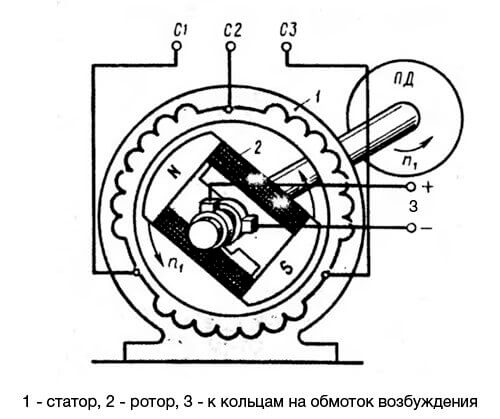
Ток возбуждения подаётся от специальных систем возбуждения, таких как «генератор-двигатель» или электронных преобразователей на тиристорах или транзисторах. Наиболее распространены на отечественных предприятиях такие приборы как ВТЕ, ТВУ и пр.

Не всегда есть обмотка возбуждения и щетки, например, в микроволновой печи в приводе вращения тарелки используется синхронный двигатель с постоянными магнитами.
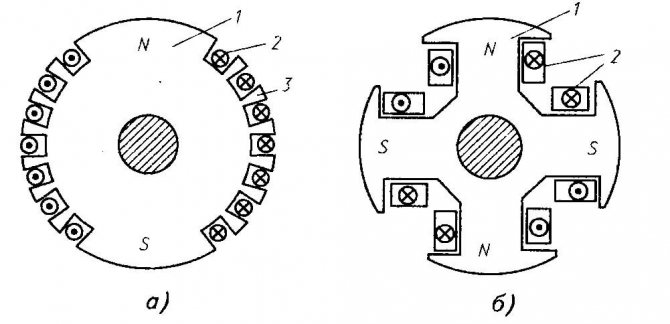
Синхронные машины бывают явнополюсными и неявнополюсны
ми. Визуальные отличия заключаются в конструкции ротора, на практике есть разница и в их характеристиках, методах производства и конструкции. На практике обычному домашнему электрику вряд ли с ними придётся столкнуться.
Остаётся сказать главное о двигателях переменного тока – они плохо поддаются регулировке скорости вращения из-за того, что их обороты привязаны к скорости. Уменьшение напряжения (тока) на статоре или возбуждения (у синхронных и асинхронных с фазным ротором) приводит к падению момента и увеличению величины скольжения (у АД), при этом вал может вращаться медленнее. Чтобы регулировать обороты таких двигателей, вам нужен частотный преобразователь. О том, как выбрать частотник, мы рассказали в статье: .
Двигатели постоянного тока (ДПТ)
Существуют следующие виды и типы электродвигателей постоянного тока:
- Коллекторные двигатели постоянного тока. Состоят из магнитов или катушки возбуждения и якоря, ток к обмотке якоря передаётся с помощью щеточного узла, недостатком которого является постепенный износ.
- Универсальные коллекторные двигатели. Похожи на предыдущие, но могут работать и от постоянного и от переменного тока.
- Бесколлекторный или бесщеточный. Состоит из обмоток статора, на роторе устанавливают постоянные магниты. Подключается к цепи постоянного тока через специальный контроллер, переключающий обмотки статора.
Коллекторные двигатели можно разделить на группы по типу возбуждения:
- с самовозбуждением;
- с независимым возбуждением.
По типу подключения обмоток возбуждения различают следующим образом:
- Последовательное возбуждение позволяет получить высокий момент на валу, но обороты холостого хода также очень высокие и могут повредить двигатель (пойдёт в разнос).
- Параллельное возбуждение — в этом случае обороты стабильнее и не изменяются под нагрузкой, но момент на валу меньше.
- Смешанное возбуждение совмещает достоинства обоих типов.
У маломощных коллекторных ДПТ возбуждение чаще всего организовано с помощью постоянных магнитов.
При независимом возбуждении у коллекторного электродвигателя обмотки статора и ротора не соединены друг с другом, а в сущности питаются от разных источников. Таким образом можно организовать регулировку момента или оборотов, а также добиться большей энергоэффективности.
В зависимости от конструкции такой электродвигатель может работать или только от постоянного тока, или работать от переменного и постоянного. Во втором случае их называют «универсальный коллекторный двигатель». Они широко распространены в быту, используются в кухонной технике и электроинструменте (болгарки, дрели и т.д.).

Бесколлекторные двигатели лишены недостатков, присущих коллекторным, за счет отсутствия щеточного узла. Ток подаётся к трём обмоткам статора, а обмотки переключаются с помощью контроллера. Фактически бесщеточные ДПТ питаются преобразованным переменным током. Принцип работы этих двигателей вы можете узнать, посмотрев следующее видео:
По устройству они похожи на синхронные двигатели, за исключением того, что используются постоянные магниты, а не электромагниты. Для вращения такого двигателя и повышения эффективности его работы используются датчики Холла для определения положения вала и правильного переключения обмоток.
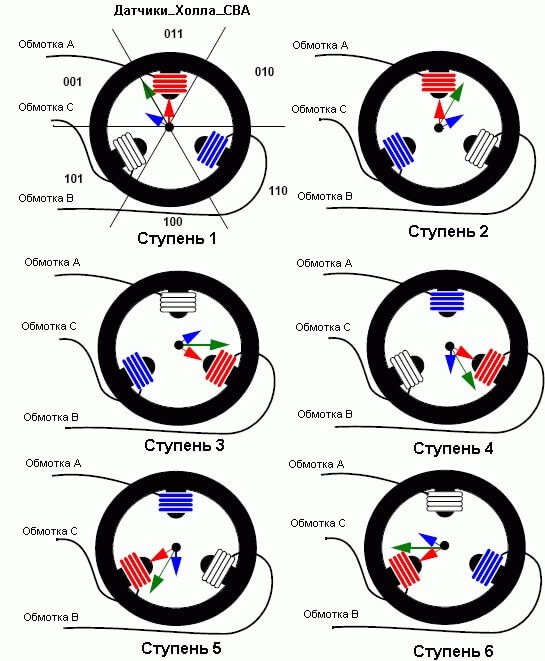
Часто их называют вентильными двигателями, а в англоязычных источниках подобные двигатели, в зависимости от конструкции, называют PWSM или BLDC.
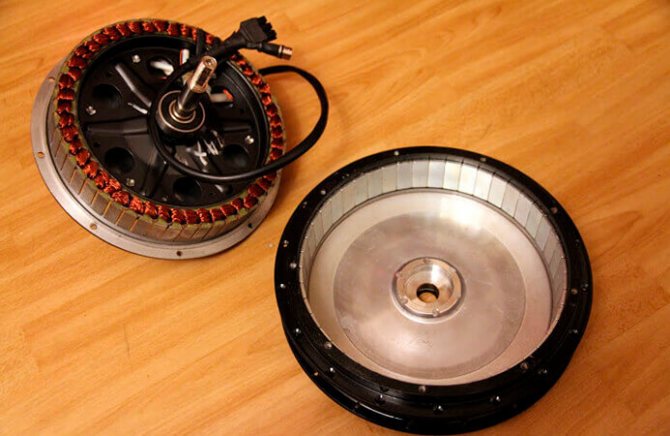
Они используются в компьютерных кулерах, в качестве привода для радиоуправляемых моделей, таких как квадрокоптеры, а также в моторколесе для велосипеда.
Схема для подключения двигателя с возбуждением параллельным
Она аналогична предыдущей, но не имеет отдельного источника питания.
Когда требуется большой пусковой ток, применяют двигатели с возбуждением последовательным: в городском электротранспорте (троллейбусах, трамваях, электровозах).
Токи обоих обмоток в этом случае одинаковы. Недостаток – требуется постоянная нагрузка на вал, поскольку при ее уменьшении на 25%, резко увеличивается частота вращения и происходит отказ двигателя.
Есть еще моторы, которые крайне редко используются — со смешанным возбуждением. Их схема представлена ниже.
Пуск путем изменения питающего напряжения
Одним из вариантов снижения токовой нагрузки при запуске электродвигателя является уменьшение питающего номинала посредством генератора постоянного напряжения или управляемого выпрямителя.
С физической точки зрения установка реостата обеспечивает тот же эффект, но с увеличением мощности электродвигателя возрастает и постоянная токовая нагрузка, существенно повышаются потери на реостатах. Поэтому снижение постоянного напряжения выполняет отдельное устройство на базе микросхемы, пример которого приведен на рисунке ниже:

Рис. 5. Схема пуска с изменением питающего напряжения
Электродвигатель постоянного тока с параллельным возбуждением
Под понятием «возбуждение» понимают создание в электрических машинах магнитного поля, которое необходимо, чтобы заработал двигатель. Схем возбуждения несколько:
- С независимым возбуждением (питание обмотки происходит от постороннего источника).
- Электродвигатель постоянного тока с параллельным возбуждением (источник питания обмотки возбуждения и якоря включены параллельно) – шунтовые.
- С последовательным возбуждением (обе обмотки включены последовательно) – сериесные.
- Со смешанным возбуждением – компаундные.
Принцип работы УКД (коллекторных электродвигателей универсального применения)

УКД (двигатели универсального использования) применяются в маломощных устройствах и электроинструментах (бытовых, профессиональных) – везде, где требуется высокий момент вращения на хорошей скорости, плавная регулировка числа оборотов и небольшие пусковые токи. По конструкции УКД повторяют синхронные с последовательной схемой электродвигателя.
Принцип работы УКД:
- при подаче напряжения на статоре возникает магнитное поле;
- исполнение магнитного провода в УКД несколько отличается – здесь они сделаны не цельнолитыми, а сборными во избежание перемагничивания и нагрева токами Фуко;
- вспомогательная обмотка ротора (индуктивность) подключается к питанию последовательно, что позволяет настраивать одинаковую направленность магнитных полей статора и ротора в одной фазе;
- магнитные поля индуктора и якоря практически полностью синхронны – электродвигатель набирает скорость вращения при высоких нагрузках, что важно для работы многих инструментов (перфораторов, шуруповертов, пылесосов, точильных аппаратов и т. д.).
При включении в цепь электродвигателя регулируемого трансформатора добавляется еще и возможность плавной регулировки его скорости вращения. А вот изменять вектор магнитного поля, если это коллекторный двигатель переменного тока, невозможно ни при каких обстоятельствах.
Коллекторный электродвигатель общего назначение имеет много плюсов. Он выдает высокий крутящий/вращающий момент, способен развивать высокую вращательную скорость, при этом весит и места занимает немного. Есть и минусы: графитовые щетки имеют низкую износостойкость (быстро стираются на больших скоростях вращения), снижая ресурс всей сборки.
Бесщеточные моторы
Но, двигатель со щетками, которые быстро изнашиваются и приводят к искрению, не может использоваться там, где необходима высокая надежность, поэтому среди электротранспорта (электровелосипедов, скутеров, мотоциклов и электромобилей) наибольшее применение нашли бесщеточные электродвигатели. Они отличаются высоким КПД, невысокой стоимостью, хорошей удельной емкостью, длительным сроком службы, малыми размерами, бесшумной работой.
Работа этого двигателя основывается на взаимодействии магнитных полей электромагнита и постоянного. Когда за окном 21 век, а вокруг полно мощных и недорогих проводников, логично заменить механический инвертор цифровым, добавить датчик положения ротора, решающий в какой момент на конкретную катушку необходимо подать напряжение, и получить бесщеточный электродвигатель постоянного тока. В качестве датчика чаще используется датчик Холла.
Поскольку в этом двигателе удалены щетки, он не нуждается в регулярном обслуживании. Управляется двигатель постоянного тока при помощи блока управления, позволяющего изменять частоту вращения вала мотора, стабилизировать на определенном уровне обороты (независимо от имеющейся на валу нагрузки).
Состоит блок управления из нескольких узлов:
- Системы импульсно-фазового управления СИФУ.
- Регулятора
- Защиты.
Виды электродвигателей: какой лучше
Описаны только основные виды электродвигателей и даны краткие характеристики, очень сжато описано устройство и принцип работы. Тем не менее, уже можно сделать выводы о том, что идеального решения, причём для всех случаев, просто нет. Есть наиболее подходящее для каждого конкретного случая.
- Асинхронный электродвигатель без частотного регулирования – лучший выбор для насосов.
- Коллекторный двигатель с его регулируемыми скоростями вне конкуренции для дрелей и пылесосов. И то, в последнее время стали делать с вентильными, они без щеток, что делает работу тише, срок службы дольше, хотя цену выше. Так что, тут, как посмотреть.

Выбирать вид электродвигателя надо под каждый конкретный случай
- Для вентиляторов с длительным режимом работы выбирать приходится между асинхронных и вентильных. Но только если они не слишком мощные. Для мощных важным является возможность разделения на секции, а это проще реализовать у вентильных. И даже на кулерах стали в последнее время использовать вентильные с магнитным ротором.
В общем, чтобы ответить какой лучше, надо рассматривать совокупность условий и характеристик работы. Принимать во внимание достоинства и недостатки, перебирать все виды электродвигателей и только так можно найти оптимальный.
Техническая версия происхождения названия
По поводу происхождения этого термина, существует две версии, каждая из которых вполне правдоподобна. Согласно первой, наиболее распространенной, брно – аббревиатура, расшифровывающаяся как «блок расключения (или распределения) начал обмоток». Такая расшифровка выглядит вполне приемлемой, так как термином «брно двигателя», обозначается клеммная коробка, установленная на его корпусе, и в ней действительно соединяются определенным образом (расключаются) выводы концов обмоток электродвигателя.
Возможно, что причиной появления столь странного для русского языка названия, стало чрезмерное увлечение аббревиатурами в 20 30 х годах, когда и происходила «электрификация всей страны». Название «ГОЭЛРО», кстати, тоже аббревиатура – «Государственный план электрификации России».
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
В чём плюсы электродвигателей YALU
Основная функция электродвигателей постоянного тока — преобразование электрической энергии постоянного тока в механическое непрерывное угловое вращение. В отличие от двигателей переменного тока они обладают возможностью регулировки частоты оборотов в большом диапазоне.
В основе работы ДПТ лежит явление электромагнитной индукции, когда на проводник в магнитном поле действует сила Ампера, вызывающая возникновение крутящего момента, который определяется током, проходящим через обмотки двигателя. Этот момент и используют в практических целях для вращения насосов, вентиляторов, колёс, компрессоров и пр.
Основными деталями ДПТ выступают статор (неподвижная часть) и ротор (вращающаяся часть). Скорость вращения определяется приложенным напряжением постоянного тока. Она может варьироваться от нескольких до тысячи оборотов в минуту. Это расширяет возможности применения ДПТ, которые можно использовать в робототехнике, электронике, автомобилестроении.

Набор для «электрификации» велотранспорта
Электродвигатели YALU обладают всеми преимуществами, которые свойственны ДПТ.
К плюсам агрегатов относятся:
- компактные размеры, особенно у двигателей на постоянных магнитах;
- быстрый запуск за счёт большой величины пускового момента;
- простая эксплуатация, связанная с практически линейными регулировочными и механическими характеристиками;
- плавная регулировка скорости вращения вала;
- возможность применения не только в качестве двигателя, но и как генератора тока.
Важной характеристикой ДПТ выступает мощность, от которой зависит КПД агрегата. Для слабых двигателей КПД составляет около 40 %, а для более мощных (1 МВт) может достигать 96 %.
Классификация электродвигателей
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР — асинхронный двигатель с короткозамкнутым ротором
- АДФР — асинхронный двигатель с фазным ротором
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СДПМП — синхронный двигатель c поверхностной установкой постоянных магнитов
- СДПМВ — синхронный двигатель со встроенными постоянными магнитами
- СРД — синхронный реактивный двигатель
- ПМ — постоянные магниты
- ЧП — частотный преобразователь
Устройство двигателей постоянного тока
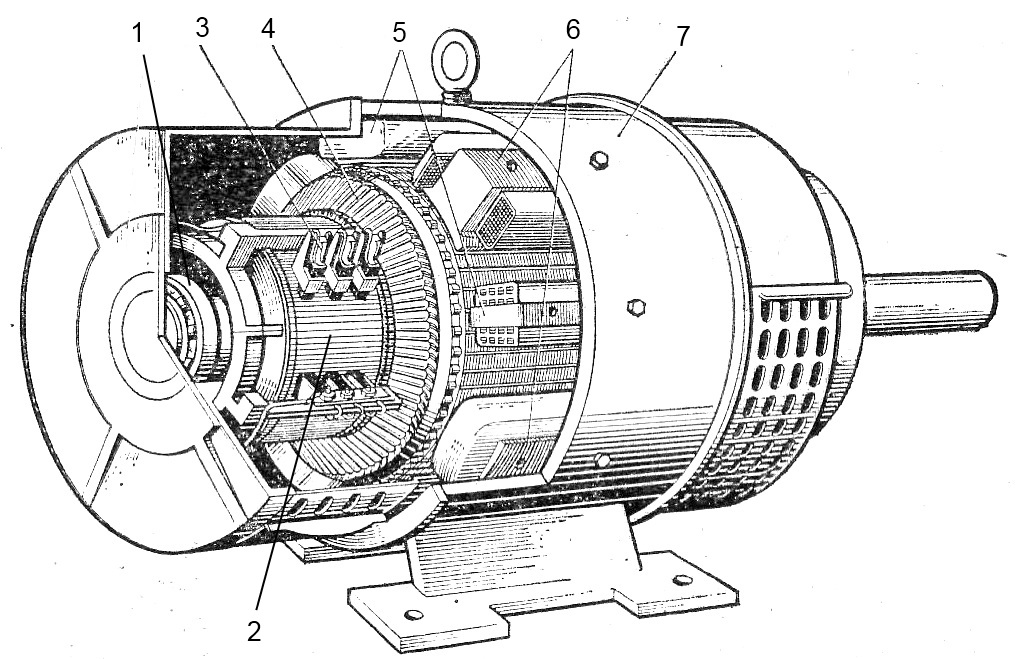
Конструкция двигателя постоянного тока аналогична двигателю переменного тока, но все же имеются существенные различия. На станине 7, которая изготавливается из стали, установлена обмотка возбуждения в виде катушек 6. Между основными полюсами, могут устанавливаться дополнительные полюса 5, для улучшения свойств ДПТ. Внутри устанавливается якорь 4, который состоит из сердечника и коллектора 2, и устанавливается с помощью подшипников 1 в корпус двигателя. Коллектор является существенным отличием от двигателей переменного тока. Он соединяется с щетками 3, что позволяет подавать или в генераторах, наоборот снимать напряжение с якорной цепи.
Применение
В основном это – транспорт, работающий на электрическом токе и устройства, в которых необходимо тщательное управление скоростью вращения.

Обычно такие двигатели можно встретить в конструкции:
- Троллейбусов;
- Электромобилей в парке аттракционов;
- Трамваев:
- Транспортно-подъемных устройствах;
- Шахтных электровозов.

А также – в детских игрушках, работающих на пальчиковых батарейках – машинках, танчиках, самолетах, вертолетах и прочем.

Следует отметить, что двигатели постоянного тока могут быть энергонезависимыми, а устройства и механизмы обладать большей маневренностью и свободой действий, не требовать подключение к источнику, питаться от мощных перезаряжаемых аккумуляторов.

Единственное слабое звено – это щетки и кольца коллектора, которые быстро изнашиваются и требуют периодической замены.

Несмотря на это, весь электротранспорт в крупных городах снабжен различными видами двигателями постоянного тока, а не асинхронными, что подчеркивает их громадную роль в жизни современного общества и страны в целом.
Конструкция и обслуживание двигателя постоянного тока
Основной обмоткой двигателя постоянного тока является якорь, подключающийся к источнику питания через щеточный аппарат. Якорь вращается в магнитном поле, создаваемом полюсами статора (обмотками возбуждения). Торцевые части статора закрыты щитами с подшипниками, в которых вращается вал якоря двигателя. С одной стороны на этом же валу установлен вентилятор охлаждения, прогоняющий поток воздуха через внутренние полости двигателя при его работе.
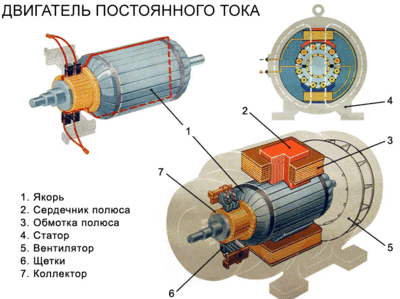
Схема двигателя постоянного тока
Щеточный аппарат – уязвимый элемент в конструкции двигателя. Щетки притираются к коллектору, чтобы как можно точнее повторять его форму, прижимаются к нему с постоянным усилием. В процессе работы щетки истираются, токопроводящая пыль от них оседает на неподвижных частях, ее периодически нужно удалять. Сами щетки нужно иногда перемещать в пазах, иначе они застревают в них под действием той же пыли и «зависают» над коллектором. Характеристики двигателя зависит еще и от положения щеток в пространстве в плоскости вращения якоря.
Со временем щетки изнашиваются и заменяются. Коллектор в местах контакта со щетками тоже истирается. Периодически якорь демонтируют и протачивают коллектор на токарном станке. После протачивания изоляция между ламелями коллектора срезается на некоторую глубину, так как она прочнее материала коллектора и при дальнейшей выработке будет разрушать щетки.
Пусковые токи
Постепенное оснащение ротора двигателя дополнительными элементами, обеспечивающими его бесперебойную работу и исключающими секторальное торможение, возникает проблема его запуска. Но все это увеличивает вес ротора – с учетом сопротивления вала столкнуть его с места становится сложнее. Первым решением этой проблемы, приходящим в голову, может быть увеличение силы тока, подаваемой на старте, но это может привести к неприятным последствиям:
- защитный автомат линии не выдержит тока и отключится;
- провода обмотки сгорят от перегрузки;
- секторы переключения на коллекторе приварятся от перегрева.
Поэтому такое решение можно назвать скорее рискованной полумерой.
Вообще, данная проблема является главным недостатком электродвигателей постоянного тока, но включает в себя основное их преимущество, благодаря которому они незаменимы в некоторых областях. Преимущество это заключается в прямой передаче момента вращения сразу же после пуска – вал (если тронется с места) будет крутиться с любой нагрузкой. Двигатели переменного тока на такое не способны.
Решить эту проблему полностью до сих пор не удалось. На сегодняшний день для пуска таких двигателей используется автомат-стартер, чей принцип работы схож с автомобильной коробкой передач:
- Сначала ток постепенно поднимается до пускового значения.
- После «сдвига» с места значение тока резко падает и снова плавно поднимается «подгоняя вращение вала».
- После подъема до предельного значения сила тока снова снижается и «подгоняется».
Данный цикл повторяется 3-5 раз (рис. 4) и решает необходимость старта двигателя без возникновения критических нагрузок в сети. Фактически, «плавный» запуск по-прежнему отсутствует, однако оборудование работает безопасно, а главное достоинство электродвигателя постоянного тока – крутящий момент – сохраняется.
Схемы подключения
Подключение ДПТ выполняется несколько сложнее, в сравнении с двигателями со спецификацией на переменный ток.
У двигателей высокой и средней мощности, как правило, есть специальные контакты обмотки возбуждения (ОВ) и якоря, вынесенные в клеммную коробку. Чаще всего на якорь подают выходное напряжение источника, а на ОВ – ток, отрегулированный, как правило, реостатом. Скорость вращения двигателя напрямую зависит от силы тока, поданного на обмотку возбуждения.
Есть три основные схемы включения якоря и обмотки возбуждения электродвигателей постоянного тока:
- Последовательное возбуждение используется в моторах, от которых требуется большая сила тока на старте (электрический транспорт, прокатное оборудование и т.п.). Данная схема предусматривает последовательное подключение ОВ и якоря к источнику. После подачи напряжения по обмоткам якоря и ОВ проходят токи одинаковой величины.Следует учитывать, что снижение нагрузки на вал даже на четверть при последовательном возбуждении приведет к резкому повышению оборотов, что может привести к поломке двигателя, поэтому эта схема и используется в условиях постоянной нагрузки.
- Параллельное возбуждение применяется в моторах, обеспечивающих работу станкового, вентиляторного и прочего оборудования, которое в момент пуска не оказывает высокую нагрузку на вал. В этой схеме для возбуждения ОВ используется независимая обмотка, регулируемая, чаще всего, реостатом.
- Независимое возбуждение очень схоже с параллельным, но в данном случае для подачи питания ОВ используется независимый источник, что исключает появление электрической связи между якорем и обмоткой возбуждения.
В современных электрических двигателях постоянного тока могут применяться смешанные схемы, основанные на базе трех описанных.
Регулировка скорости вращения
Способ регулирования оборотов ДПТ зависит от схемы его подключения:
- В моторах с параллельным возбуждением снижение оборотов относительно номинала можно производить изменяя напряжение якоря, а повышение – ослабляя поток возбуждения. Для увеличения оборотов (не более чем в 4 раза относительно номинальной величины) в цепь ОВ добавляется реостат.
- При последовательном возбуждении регулировка легко осуществляется переменным сопротивлением в цепи якоря. Правда этот метод подходит только для снижения оборотов и лишь в соотношениях 1:3 или 1:2 (кроме того, это приводит к большим потерям в реостате). Повышение осуществляется с помощью регулировочного реостата в цепи ОВ.
Данные схемы редко применяются в современном высокотехнологичном оборудовании, поскольку обладают узким диапазоном регулировки и другими недостатками. В наши дни для этих целей все чаще создают электронные схемы управления.
Реверсирование
Для того чтобы реверсировать (обратить) вращение двигателя постоянного тока необходимо:
- при последовательном возбуждении – просто изменить полярность входных контактов;
- при смешанном и параллельном возбуждении – необходимо менять направление тока в обмотке якоря; разрыв ОВ может привести к критическому повышению нагнетаемой электродвижущей силы и пробою изоляции проводов.
Сфера применения
Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения. С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.

Самый простой щёточно-коллекторный узел
Достоинства и недостатки
Резюмируя все вышесказанное, можно описать характерные для электродвигателей постоянного тока достоинства и недостатки относительно их аналогов, рассчитанных на работу от переменного тока.
Основные достоинства:
- ДПТ незаменимы в ситуациях, когда необходим сильный пусковой момент;
- скорость вращения якоря легко регулируется;
- двигатель постоянного тока является универсальной электрической машиной, то есть может применяться в качестве генератора.
Главные недостатки:
- ДПТ имеют высокую производственную стоимость;
- использование щеточно-коллекторного узла приводит к необходимости частого техобслуживания и ремонта;
- для работы нужен источник постоянного тока или выпрямители.
Электродвигатели постоянного тока, безусловно, проигрывают своим «переменным» сородичам по стоимости и надежности, однако используются и будут использоваться, поскольку плюсы от их использования в определенных сферах категорические перечеркивают все минусы.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
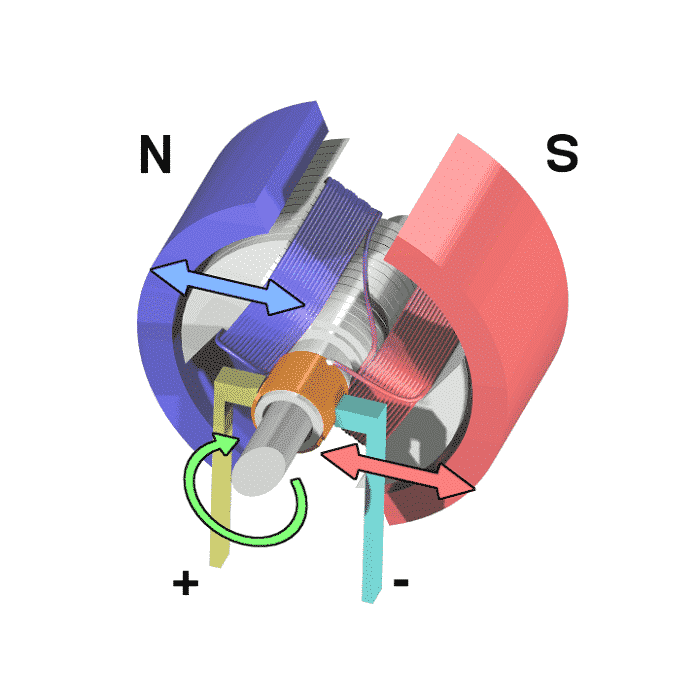
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
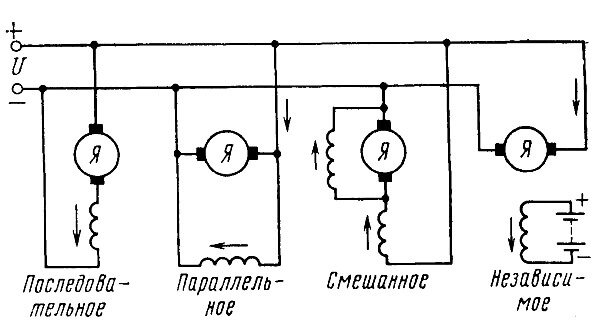
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
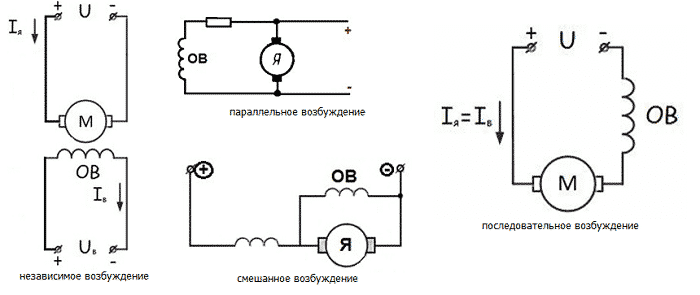
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.

Рисунок 3. Ротор с тремя обмотками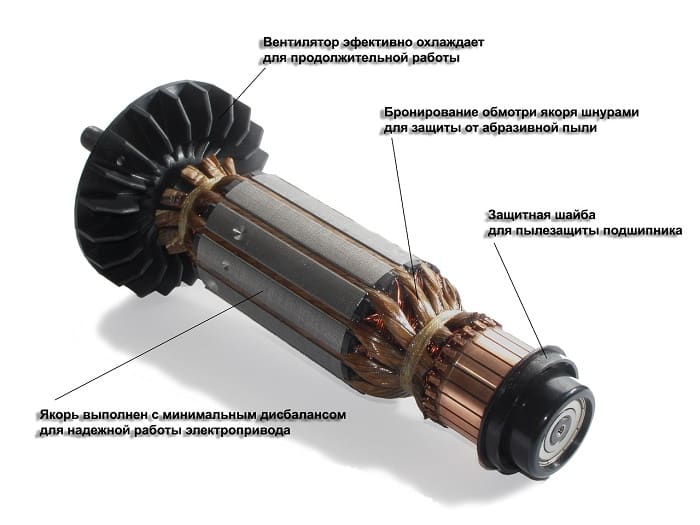
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
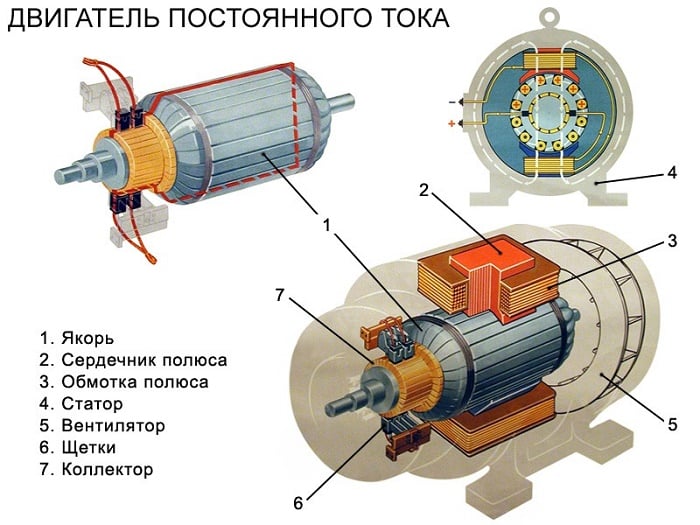
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
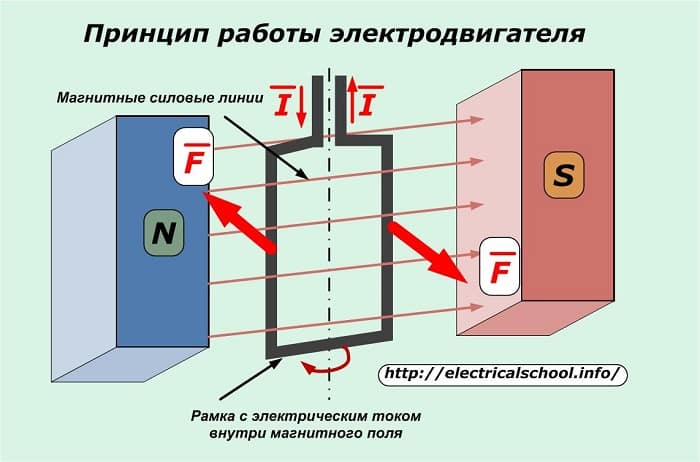
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
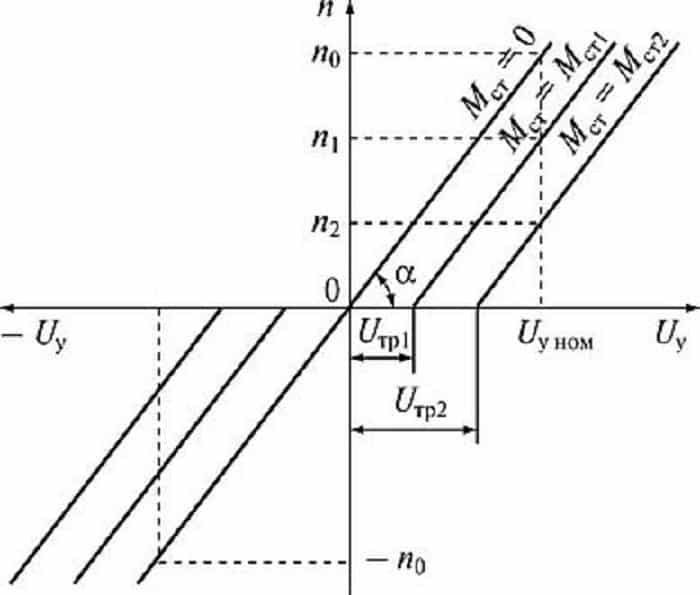
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.


